ROBOT CONFIGURATION CUSTOMIZATION
35
Comau Robotics Product Instruction
3.2.4.5 e.DO Gripper installation procedure
The installation procedure of the e.DO Gripper on the e.DO Robot is given below.
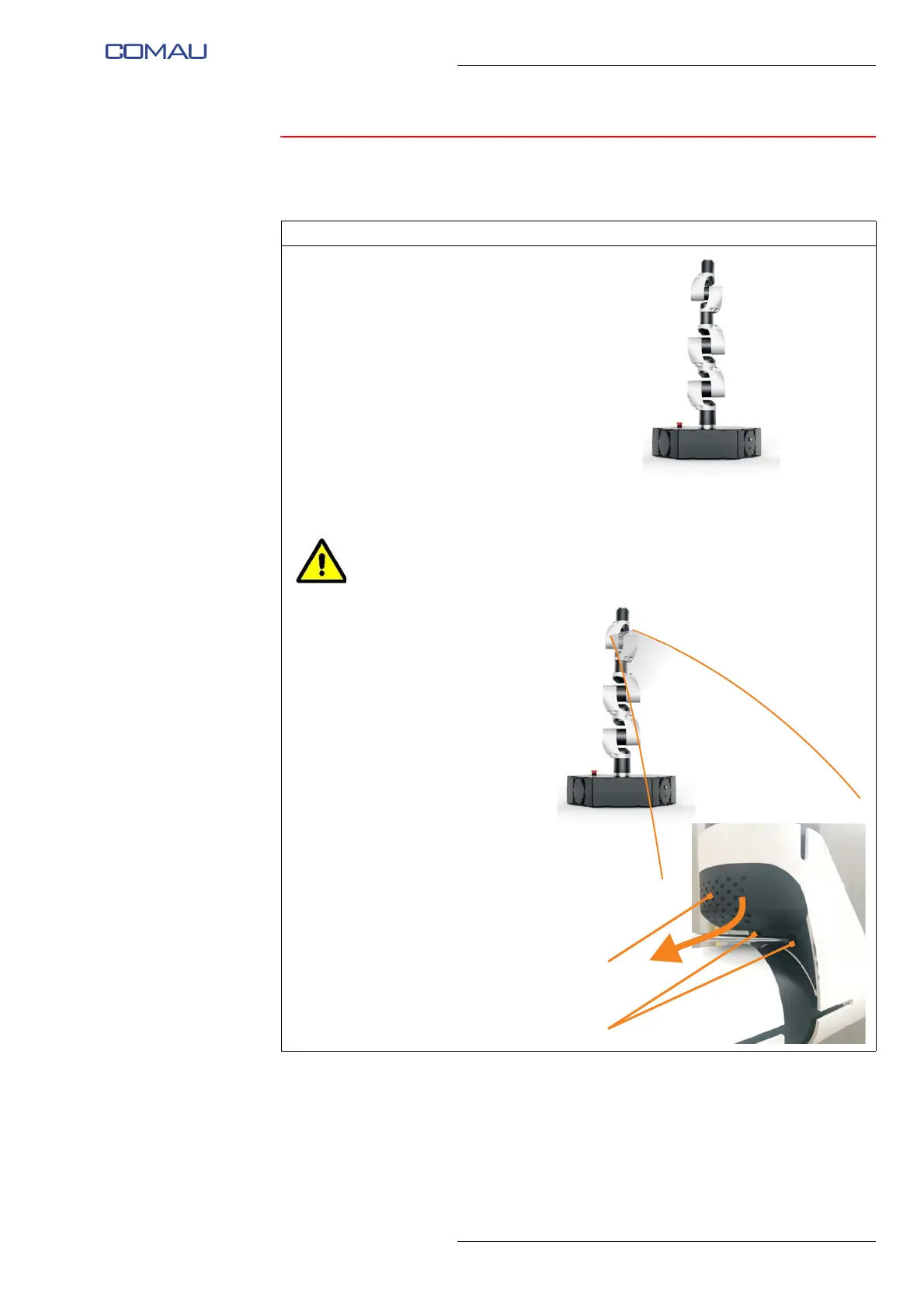
Operating procedure
a. Through the app, move the
e.DO Robot to calibration
position.
Representative figure illustrating e.DO Robot in calibration
position.
At the end of the movement, shut down the e.DO, position the main switch
in the open position (0 - OFF) then remove the plug from the power supply
socket.
b. Using a 2.5 mm Allen wrench,
unscrew the two fixing socket
hex head screws (A) M3x8 of
the plastic protective cover (B)
of the last Robot joint.
c. Remove the plastic protective
cover (B) of the last Robot joint.