ROBOT CONFIGURATION CUSTOMIZATION
47
Comau Robotics Product Instruction
3.2.5.3 e.DO Marker Holder installation procedure
The installation procedure of the e.DO Marker Holder on an e.DO Robot without e.DO
Gripper is given below.
This procedure is valid only for the installation of the e.DO Marker Holder on a Robot
without e.DO Gripper.
Operating procedure
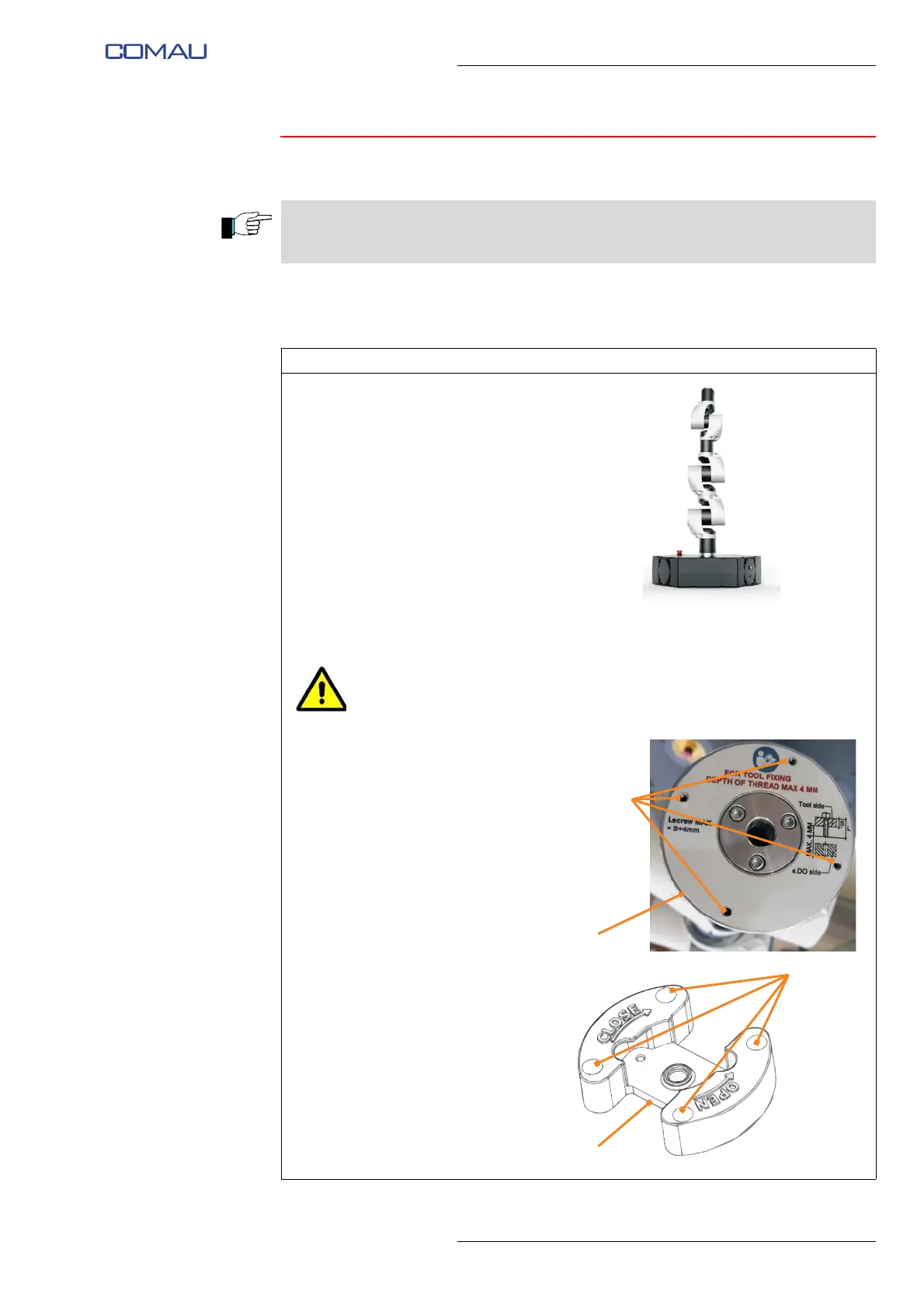
a. Through the app, move the
e.DO Robot to calibration
position.
Representative figure illustrating e.DO Robot in calibration
position.
At the end of the movement, shut down the e.DO, position the main switch
in the open position (0 - OFF) then remove the plug from the power supply
socket.
b. Position the base flange (A) of
the e.DO Marker Holder on the
e.DO flange (B), matching the
fixing holes (C) and (D).