Epsilon EP-P Drive Reference Manual 89
Revision A4 www.controltechniques.com
Jog.#.Decelerating
This source is active while a jog is decelerating from its target velocity. Once the Jog reaches zero velocity (or its new target
velocity), the Jog.#.Decelerating source will deactivate.
Destinations
The following destination functions can be found in the Assignments view under the Jog setup group:
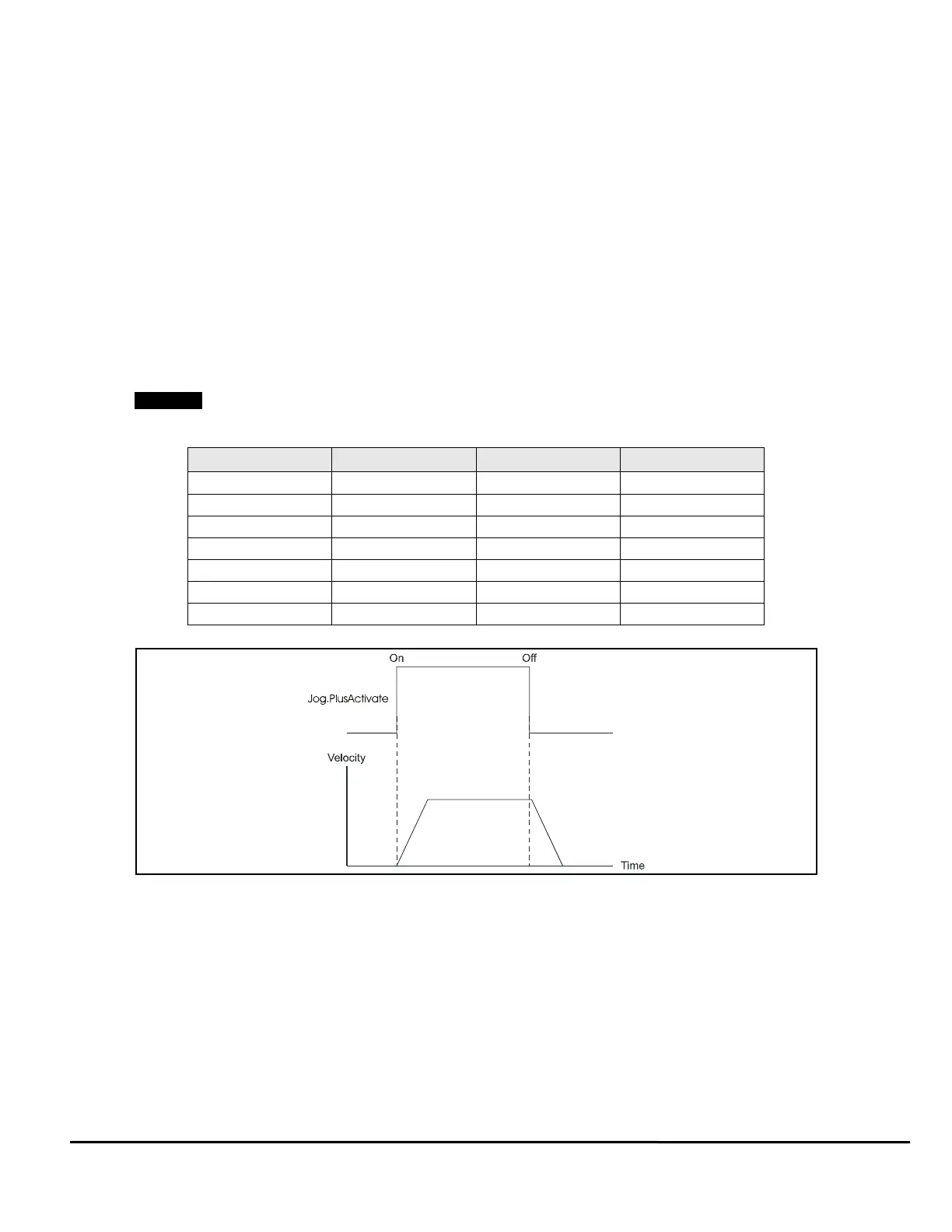
Jog.PlusActivate
When this destination is activated, jogging motion will begin in the positive direction. The jog velocity is determined by which
jog (Jog0 or Jog1) is active or not. A jog stops when this destination is deactivated. If the jog velocity is negative,
Jog.PlusActivate will cause the motor to jog in the negative direction.
Jog.MinusActivate
When this destination is activated, jogging motion will begin in the negative direction. The jog velocity is determined by which
jog (Jog0 or Jog1) is active or not. A jog stops when this destination is deactivated. If the jog velocity is negative,
Jog.MinusActivate will cause the motor to jog in the positive direction.
Jog.Select0
This destination is used to select between Jog0 and Jog1. When the Jog.Select0 destination is not active, the target velocity
for the jog is the Jog.0.Velocity. If the Jog.Select0 destination is active, the target velocity of the jog is the Jog.1.Velocity.
Jog.Select0 can be toggled “On” or “Off” while jogging. Jog acceleration and deceleration ramps are used to ramp between jog
velocities.
Below is a description of jog operation using these destinations.
In the table below Jog.0.Velocity = 100 RPM and Jog.1.Velocity = -500 RPM.
All Jog destinations are level sensitive.
Figure 103: Jog Activation
Jog.PlusActivate Jog.MinusActivate Jog.Select0 Motion
Off Off Off 0 RPM
On Off Off +100 RPM
Off On Off -100 RPM
On Off On -500 RPM
Off On On +500 RPM
On On Off 0 RPM
On On On 0 RPM