60 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
data. A subsequent index, jog, or dwell can then use the captured data to start itself extremely accurately at the end of the previous motion.
PLS Status – A rising or a falling edge of a Global PLS will automatically capture data for use in initiating motion. In order to accurately initiate
motion from a Global PLS, an assignment can be made from PLS.#.Status to the initiate destination.
Destinations that use captured data:
Index/Jog Initiates – When one of the sources listed above is assigned to an Index or Jog Initiate, the captured information is automatically
applied to the index starting point. This offers extremely high accuracy for initiation of motion, which is beneficial especially in synchronized
applications.
Index.#.SensorTrigger – The sensor trigger destination used in registration indexes can use captured data to accurately calculate the ending
position of the index based on the Registration Offset parameter. The Offset distance is added to the captured position to get the accurate
stopping position for the registration index.
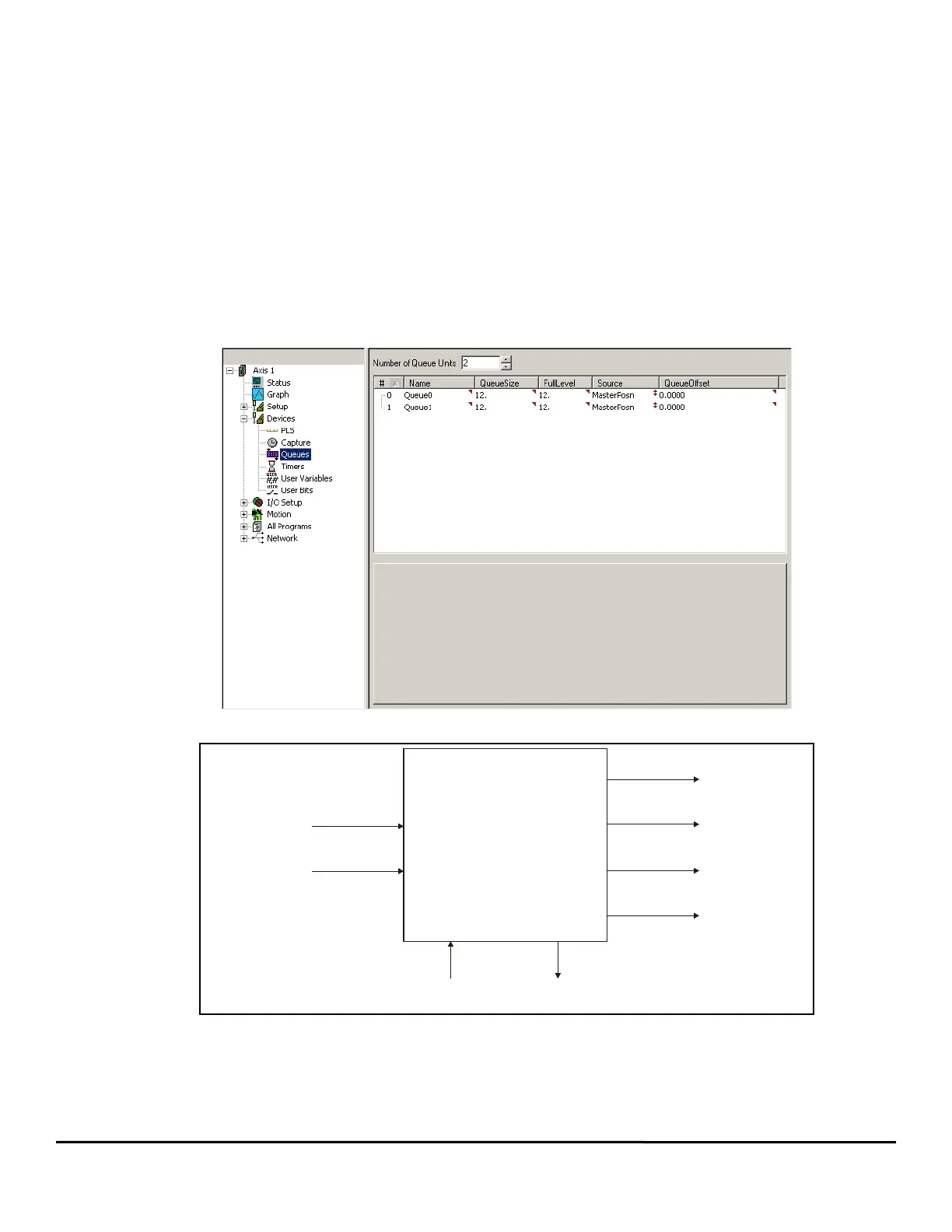
3.21 Queues View
Many applications require the ability to store data in a temporary memory location as the data comes in. The user then has access to the data
for use in a program or other operation. The Epsilon EP-P drive use an object called a queue to store data in this way. The queue is a first-in-
first-out (FIFO) type memory device. In other words, the first piece of data put into the queue is the first piece of data to come out of the queue.
The user has complete control over what data is stored in the queue, and when to put data into the queue, as well as when to remove it from
the queue.
Figure 63: Queues View
Figure 64: Queue Object and Components Diagram
A detailed explanation of each of the queue components is as follows:
Queue Data
The queue data is loaded into the queue by statements in the user program. Two types of data are most often used with the queue: Position
Feedback, and Master Position Feedback.
Data[ ]
Size
Offset
Full Level
Comparitor Select
Name
Queue Object
Clear
Compare
Enable
Exit
Empty
Full
Overflow
Data In
Queue Data = X
Data Out
Y = Queue Data