Epsilon EP-P Drive Reference Manual 139
Revision A4 www.controltechniques.com
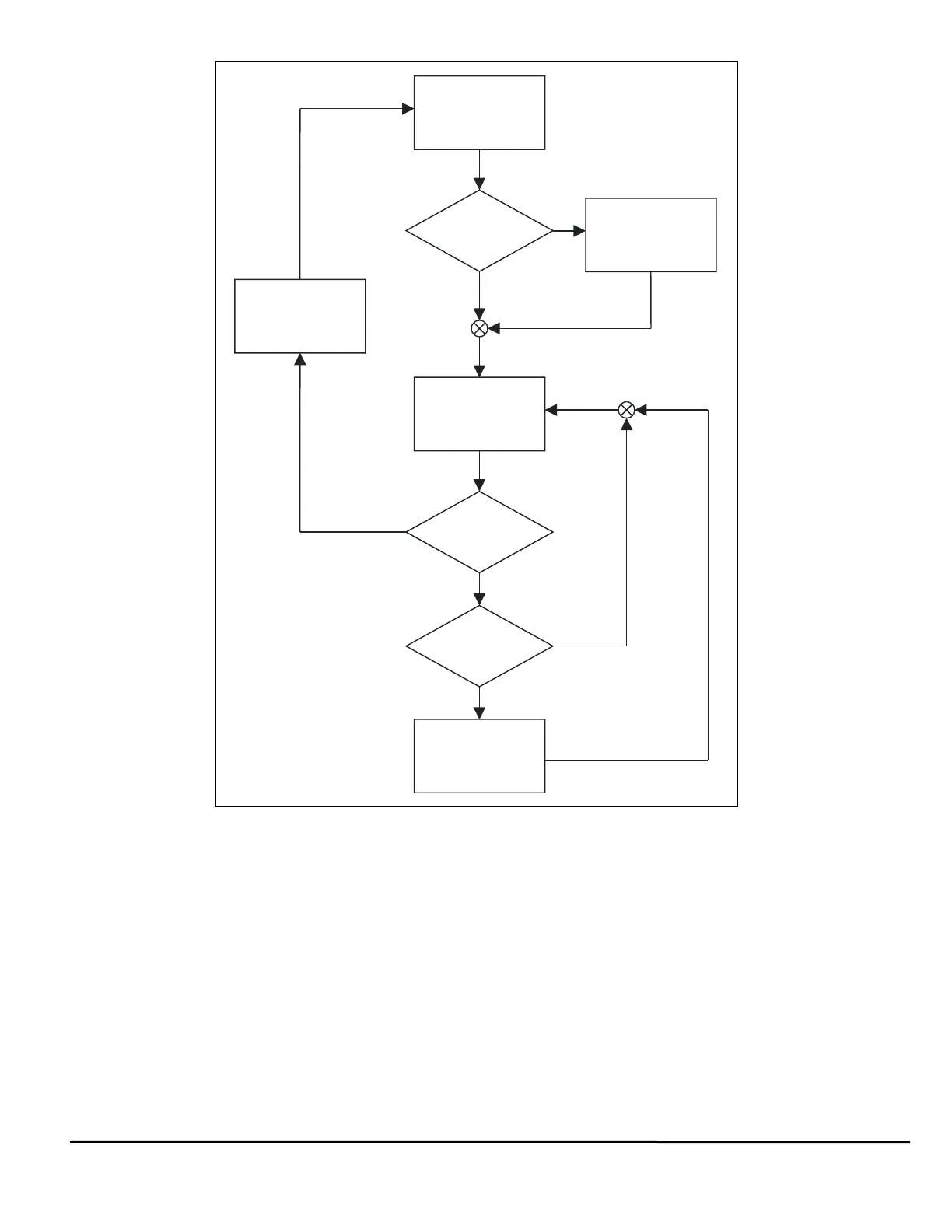
Figure 143: Time Slicing Flow Chart
4.6 Example Programs
Out and Return - Simple
Description: Move out to an absolute position and return
Index.2.Initiate ‘Absolute,Posn=10.000in,Vel=5.0in/s
Index.1.Initiate ‘Absolute,Posn=0.000in,Vel=10.0in/s
Wait For Index.AnyCommandComplete
Out and Return – More Complex
Description: Home, Wait For an input, Move out to an absolute position, set an output, dwell for 1 second, clear the output,
return to home position, repeat the out and return sequence until the stop input halts the program.
Home.0.Initiate ‘Sensor,Offset=0.000in,Vel=-10.0in/s
DriveOutput.1=ON ‘Set the “At Position 1” output
Do While (TRUE) ‘Repeat until the program is halted
Wait For DriveInput.2=ON ‘Wait for the “Go” Input
t = 0 usec
Control Loop
Update
Message(s)
Waiting?
Process
Message(s)
Process Task
End of
Update?
t = 1600 usec
Switch to next task
Task
Blocked?
Switch to next task
No
No
No
Yes
Yes
Yes