8 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
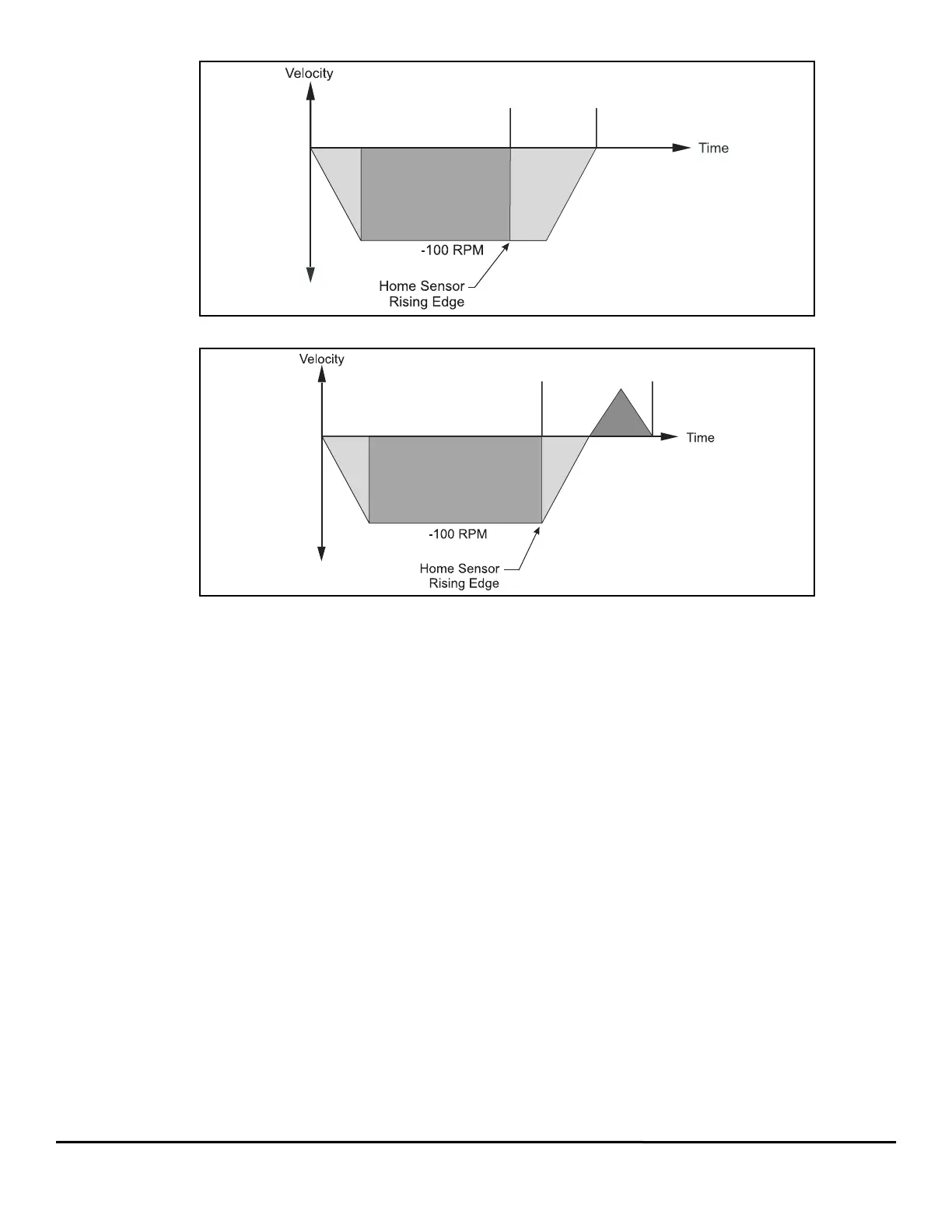
Figure 14: Specified Home Offset, Greater than Calculated Offset
Figure 15: Specified Home Offset, Backup Required
2.5.5 End of Home Position
The End of Home Position (End Posn) defines the home position in relation to the machine’s coordinate system. At the completion of the
home, the value of the End of Home Position is put into the command position.
2.5.6 Home Limit Distance
This parameter places an upper limit on the incremental distance the motor will travel during the home.
If no reference is found, the system will decelerate and stop at the limit distance. The Home Limit Distance Hit function will be activated if the
home stops at the limit distance without finding the reference. Additionally, the Home.CommandComplete function will not turn “On” if the limit
distance is hit.
2.5.7 Home Examples
Linear Application
In this example, the system uses an external sensor and the motor’s encoder marker channel to establish a Home Reference Position. This is
the most accurate and most common way to home.
Specified
Offset