6 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
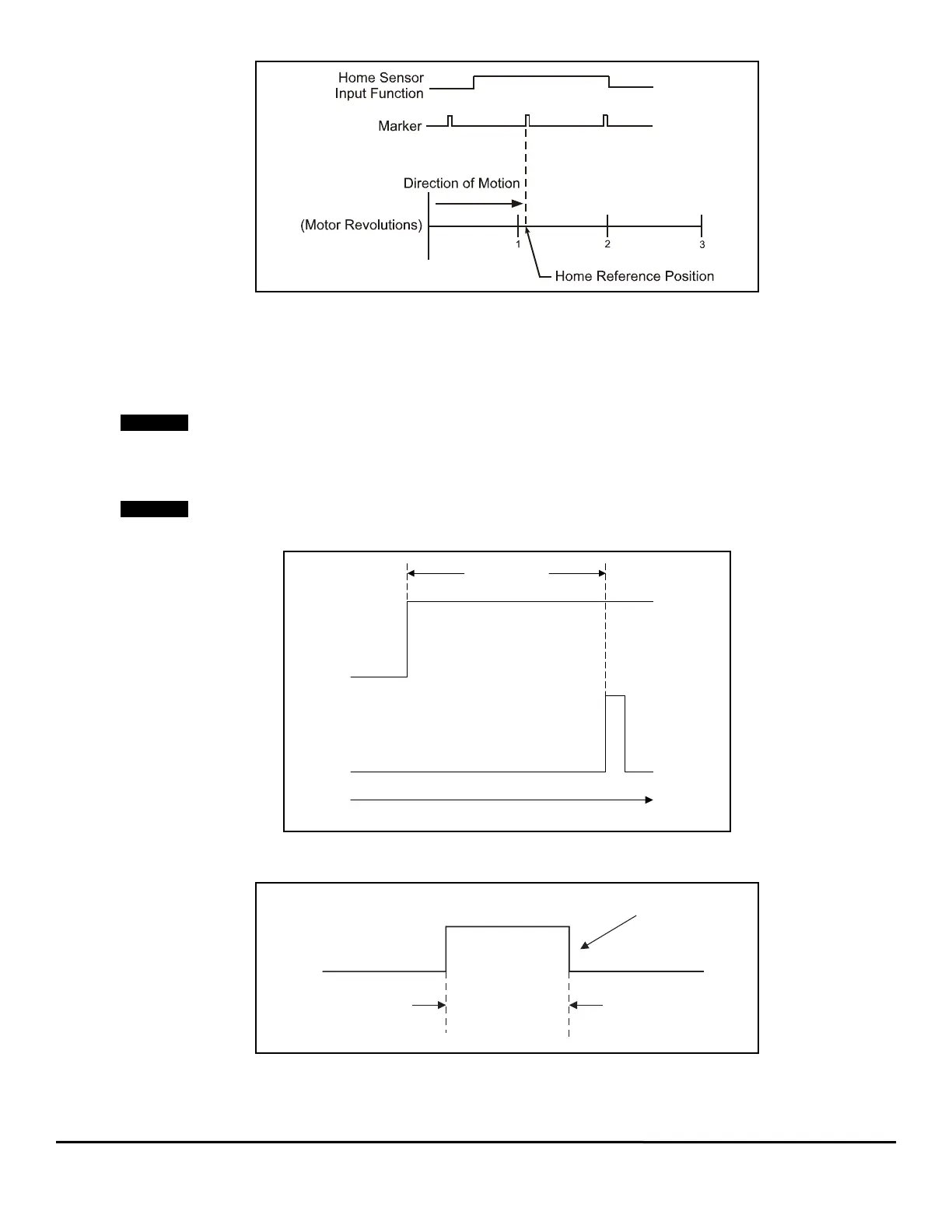
Figure 9: Sensor then Marker Home Reference Position Example 1
2.5.3 Accuracy and Repeatability
The accuracy is one trajectory update rate. For example - if the trajectory update rate is set to 800 s then the accuracy will be 800 s, if the
trajectory update rate is set to 1.6 ms then the accuracy will be 1.6 ms.
The amount of accuracy the application requires will determine the Home Reference type selected. Homing to an external sensor will only
establish a repeatable home position within 0.04 revolutions at 3000 RPMs (800 sec sensor capture interval).
The data above assumes the use of a perfectly repeatable home sensor.
In Sensor then Marker applications, the marker must be at least 800 sec after the rising edge of the sensor input to be considered a valid
marker pulse, see
Figure 10.
At 1000 RPM, the motor will travel 0.0133 revolutions (or 4.8°) in 800 sec.
Figure 10: Sensor then Marker Home Reference Position Example 2
The Home Sensor must be “On” for at least 800 sec to guarantee that it will be recognized.
Figure 11: Sensor then Marker Home Reference Position Example 3
2.5.4 Home Offset
The Home Offset is the distance from the home reference position to the final stopping point at the end of the homing sequence. Regardless of
Marker
Sensor
>800 µsec
Direction of Travel
800 μsec
Sensor
Sensor Min.
On Time