Epsilon EP-P Drive Reference Manual 113
Revision A4 www.controltechniques.com
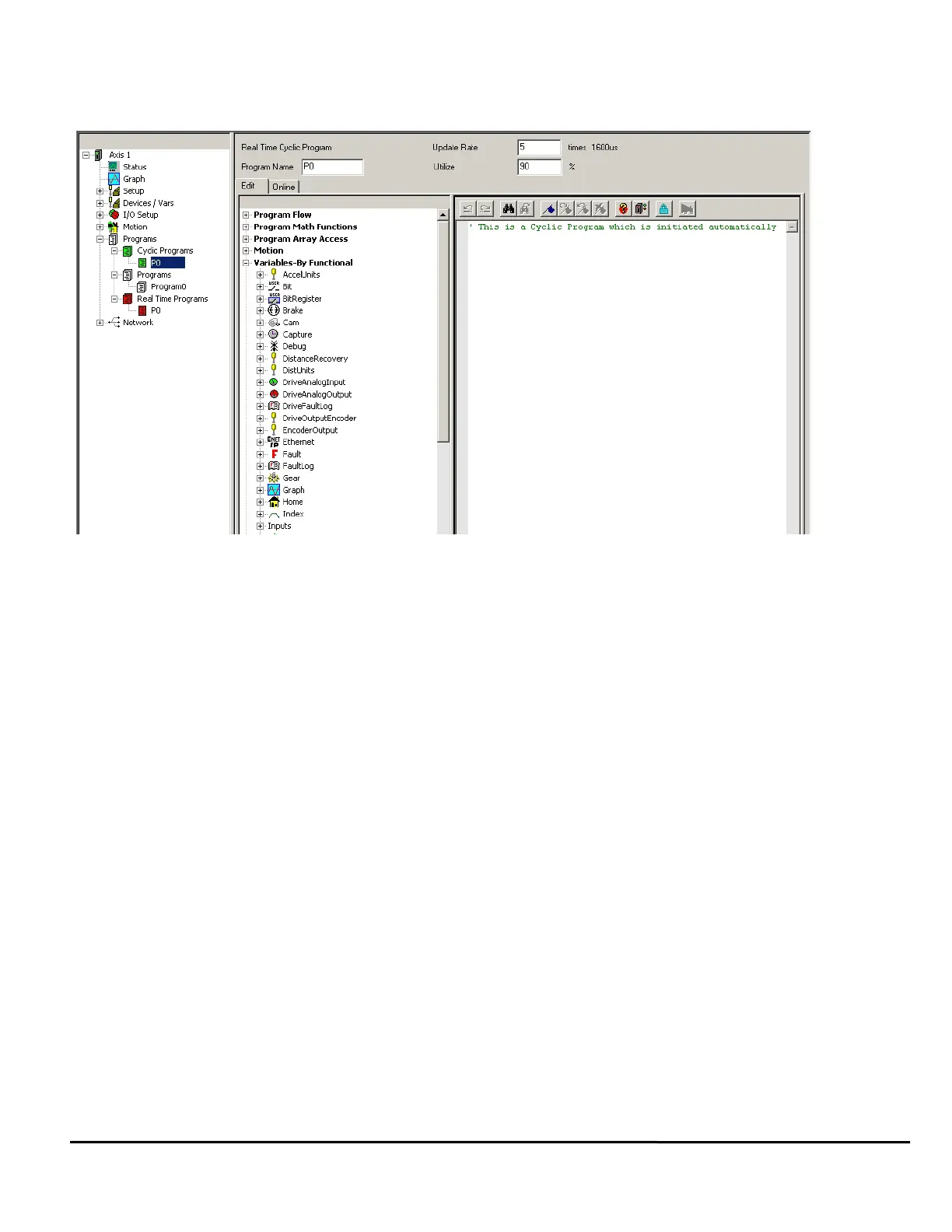
Cyclic Program View
The Cyclic Program initiation is synchronized to a multiple of the update rate cycles. Therefore it provides a deterministic cycle
time that is repeated automatically. The Cyclic Program executes over multiple update rates and therefore has a reduced
program instruction set compared to Real Time programs.
Figure 122: Cyclic Programs View
Program Name
This is a 12 character string that the user can assign to an individual program. It allows the user to give a descriptive name to
the program for ease of use.
Update Rate
This parameter defines the number of Update rates the cyclic program has to finish. This parameter can only be setup on the
Cyclic Program view.
Utilize
Utilize is the percent of the Control Loop time utilized for control loop, Real Time Program and a portion of the Cyclic Program.
When this limit is hit, the cyclic program is suspended until the next control loop. The percentage left over will processes user
programs, communications and other processes. To prevent complete starvation of user programs and communications, the
execution of the Cyclic Program is spread out over several control loops based on the Utilize percentage.
The drive’s CPU time is allocated between the background processes and the foreground control loop interrupt. The control
loop interrupt executes event updates, motion calculations, the complete real time program and a portion of the cyclic program
up to the Utilize percentage of the trajectory rate. Then the control loop interrupt is exited and the background processes
continue to run.
No matter how low the Utilize percentage is set, the required control loop motion calculations will be completed, the Real Time
Program will run to completion, and at least one cyclic instruction will be executed. If these do not complete, a real time
program timeout fault is generated. A Cyclic Program Timeout Fault occurs if the cyclic program has not completed at the next
Cyclic Program Initiate.
In actuality the Cyclic Programs are initiated from the control loop but are run outside the control loop interrupt. They run as
processes along with user programs, but at a higher priority so cyclic programs are run before any user program. Other
processes may run at lower or higher priorities. These include processing the communications. The cyclic programs are
suspended and resumed based the utilize percentage and trajectory rate.