10 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Figure 18: Home Move Sequence
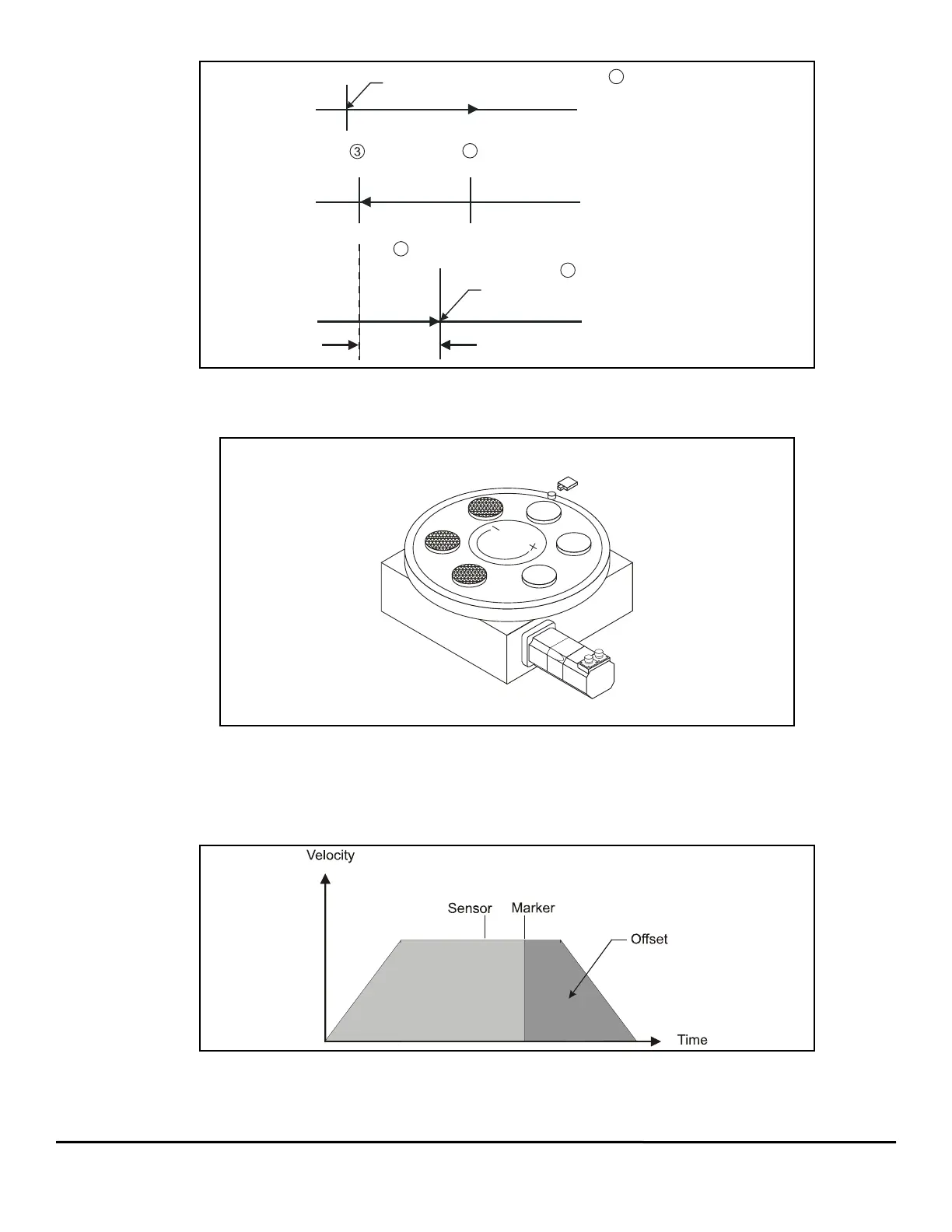
Rotary Application
This example uses an external sensor and the motor’s encoder marker pulse to establish a home reference position.
Figure 19: Home Sensor and Marker then Offset, Example
When the drive sees the rising edge of the Home Initiate function, it accelerates the motor to the Home Velocity. The motor continues at that
velocity until it first senses the Home Sensor input. The motor continues on at the home velocity until the marker is activated.
The rising edge of the motor’s encoder marker channel is used to establish the reference position.
After sensing the rising edge of the motor’s marker channel, the drive will continue moving and will decelerate to a stop at the specified offset
position.
Figure 20: Home Velocity Profile
Sensor
Marker
Home Move
Back Off Sensor
Start of Home
1
2
Offset
Offset Move
2.0 Revs
Final Position = End of Home Position
4
5
NT Motor
External
Home Sensor
Gear
Reducer