Parameter
structure
Keypad and
display
Parameter x.00
Parameter
description format
Advanced parameter
descriptions
Serial comms
protocol
Performance
Menu 5
Mentor MP Advanced User Guide 79
Issue Number: 4 www.controltechniques.com
This parameter shows the motor torque per amp used to calculate the speed controller gains when the automatic setup methods are active
(i.e. Pr 3.17 = 1 or 2).
The drive calculates the motor torque per amp using the motor parameters as shown.
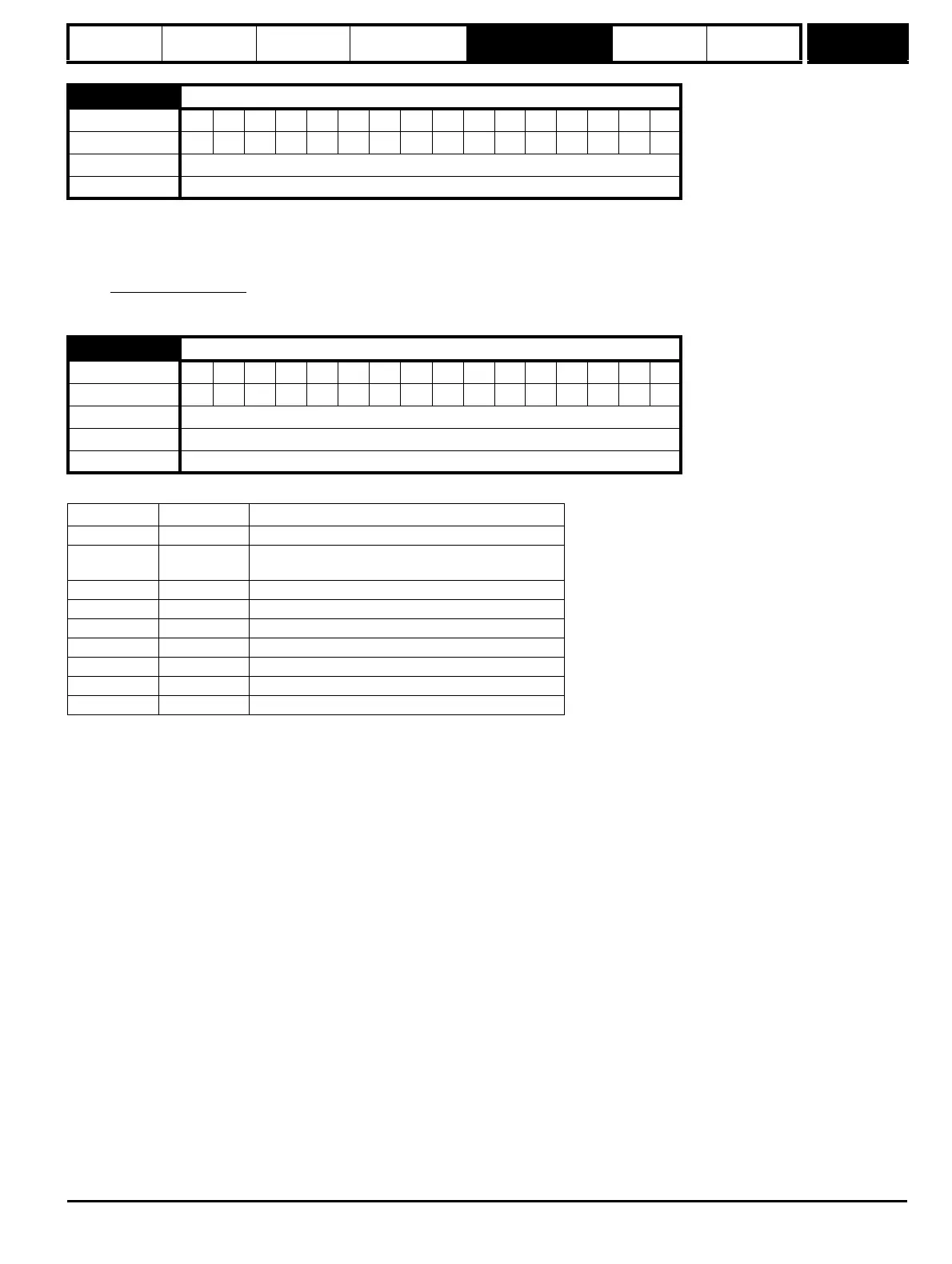
Parameter that contains the nine armature modes. This function is only available from firmware version V01.06.00 user and V01.09 power.
5.32 Motor torque per amp (Kt)
Coding BitSPFIDETEVMDPNDRANCNVPTUSRWBUPS
31 1
Range
0.00 to 50.000 N m A
-1
Update rate Background (1s) write
Kt =
V
Arated
- I
Arated
x Ra
Rated speed (rad/s)
5.43 Armature mode
Coding BitSPFIDETEVMDPNDRANCNVPTUSRWBUPS
1 111
Range 0 to 8
Default 0
Update rate Read on reset. Only implemented when drive is inactive.
Number Text Description
0 Std Normal (1Q or 4Q)
1 P.1br
Parallel - 1 bridge. Current loop gains reduced by half.
No bridge lock-out.
2 P.2br12P Parallel - 2 bridge - 12 pulse
3 P.2br24P Parallel - 2 bridge - 24 pulse
4 FrEE Not used
5 Not used
6 Not used
7 P.cont Parallel 6P master
8 P.SLAuE Parallel 6P slave