Menu 5
Parameter
structure
Keypad and
display
Parameter x.00
Parameter
description format
Advanced parameter
descriptions
Serial comms
protocol
Performance
80 Mentor MP Advanced User Guide
www.controltechniques.com Issue Number: 4
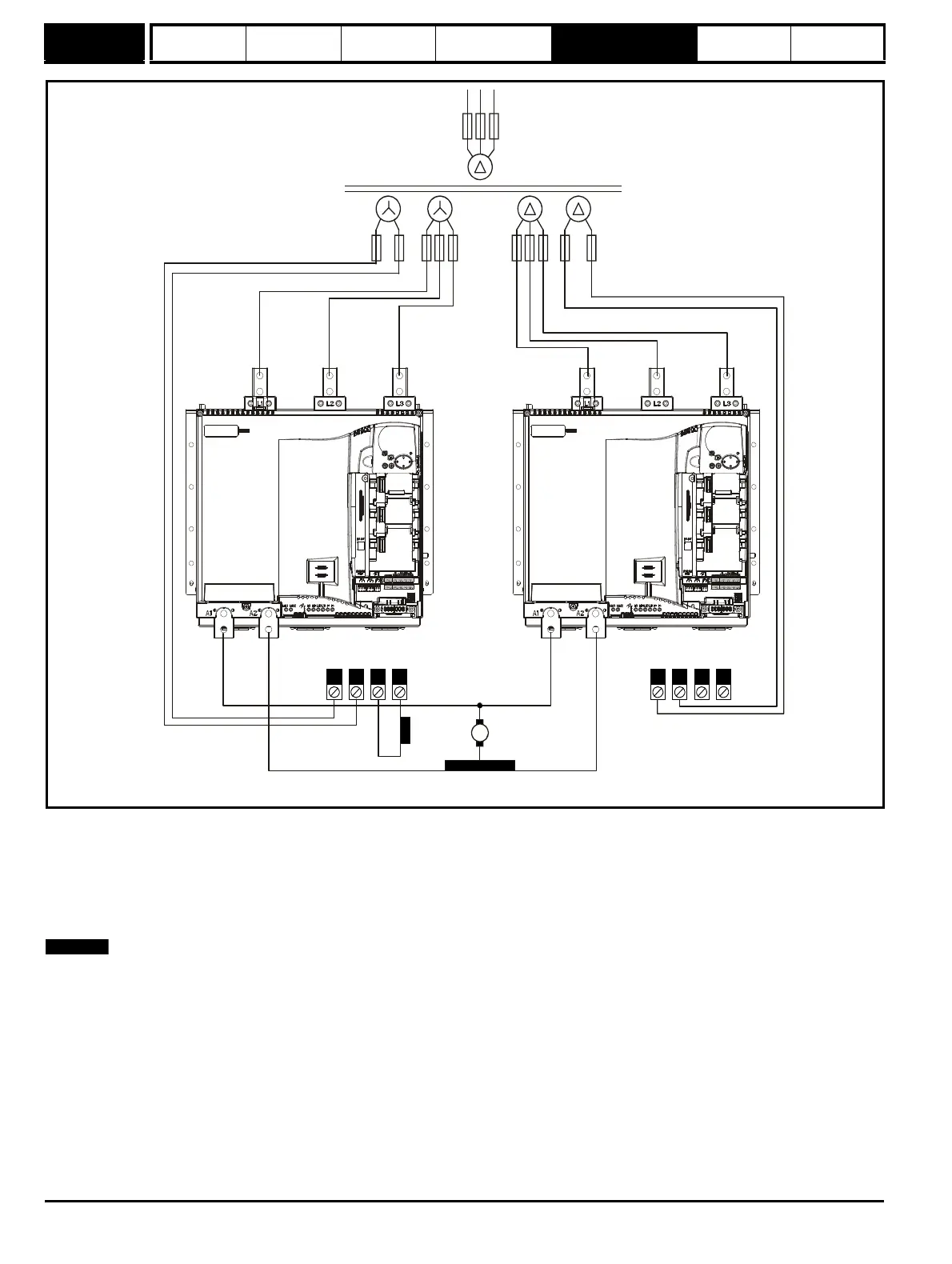
Figure 5-7 Parallel 12 Pulse
*For fuse information please refer to section 4.6 in the Mentor MP User Guide.
To configure the drives for use in a parallel 12 pulse speed control system, they should be programmed so that the master drive is set up in speed
control mode (Pr 4.11 = 0), and the slave drive is programmed in torque control mode (Pr 4.11 = 1). The final current demand (Pr 4.04) on the master
drive has to be fed in to the slave drive torque reference (Pr 4.08). This current demand signal can be transferred between the drives using either an
analog input / output, communication module or by using CT Sync.
Additional bridge interlocking signals are shared between the two modules, when a four quadrant system is required to ensure that the same bridge
on both drives is firing and also that the current has reached zero on both drives before current reversal is attempted.
Only terminals relevant to 12 pulse operation have been shown.
Master drive Slave drive
Motor field
winding
Motor
armature
Interbridge
reactor
E1 E3 F+