Curtis 1298 Manual, OS 11
27
3 — PROGRAMMABLE PARAMETERS: Speed Controller & Velocity Feedforward Parameters (SPEED MODE)
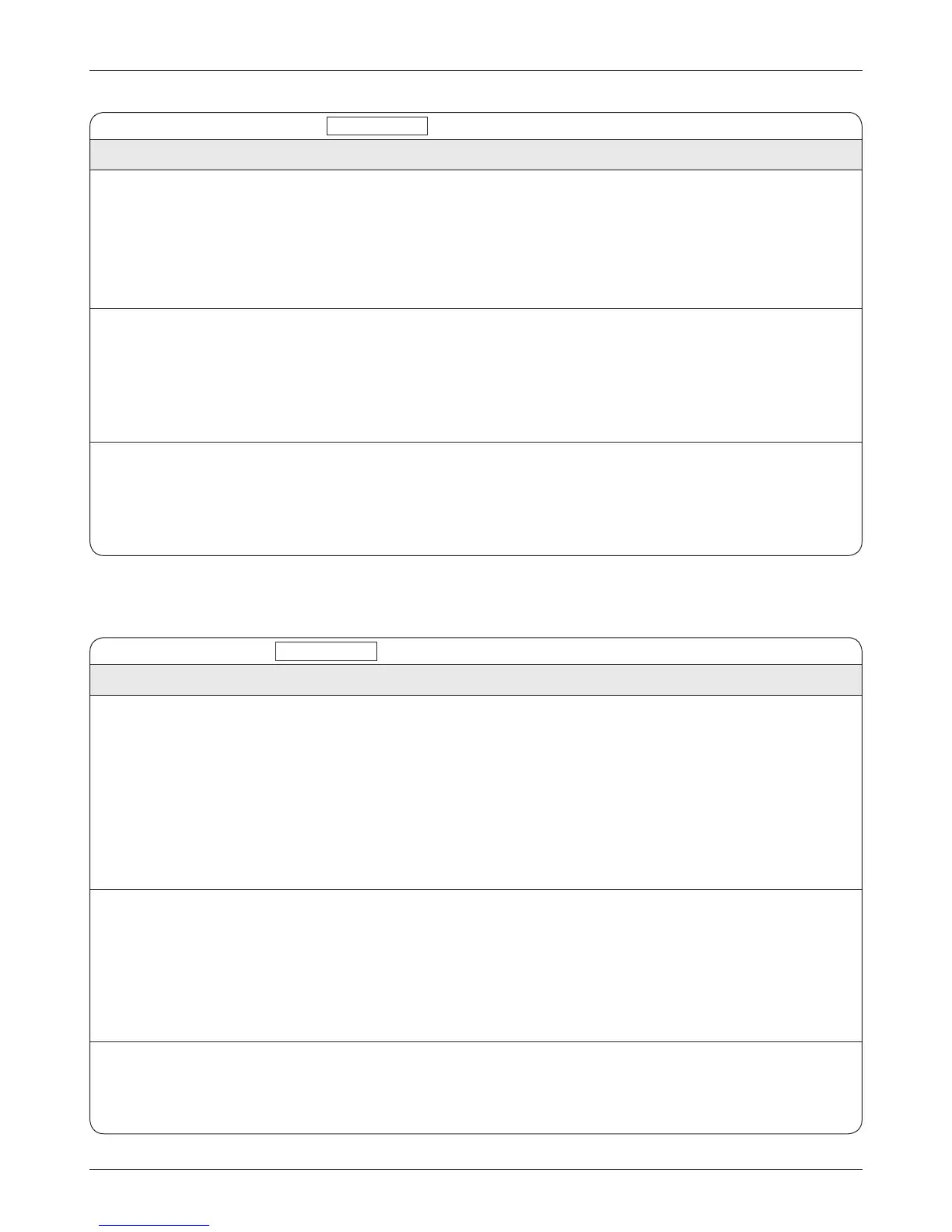
1 – SPEED MODE SPEED CONTROLLER MENU
ALLOWABLE
PARAMETER RANGE DESCRIPTION
Max Speed 100–8000 rpm Defines the maximum requested motor rpm at full throttle. Partially-applied
Max_Speed_SpdM 100–8000 throttle is scaled proportionately; e.g., 40% applied throttle corresponds to
a request for 40% of the set Max Speed Value.
If Max_Speed_SpdM is set <100 rpm (through VCL or CAN), the
throttle request is zeroed.
Note: The maximum motor rpm is subject to the constraints on page 25.
Kp 0–100 % Determines how aggressively the speed controller attempts to match
Kp_SpdM 0–8192 the speed of the motor to the commanded speed. Larger values provide
tighter control.
If the gain is set too high, you may experience oscillations as the
controller tries to control speed. If it is set too low, the motor may behave
sluggishly and be difficult to control.
Ki 5–100 % The integral term (Ki) forces zero steady state error, so the motor will run
Ki_SpdM 50–1000 at exactly the commanded speed. Larger values provide tighter control.
If the gain is set too high, you may experience oscillations as the
controller tries to control speed. If it is set too low, the motor may take
a long time to approach the exact commanded speed.
1 – SPEED MODE VELOCITY FEEDFORWARD MENU [OPTIONAL]
ALLOWABLE
PARAMETER RANGE DESCRIPTION
Kvff 0–500 A This velocity feedforward term is designed to improve throttle responsive-
Kvff_SpdM 0–5000 ness and speed controller performance, especially at low speeds.
For traction systems, set it to 50–70% of the current needed to
maintain a very low speed, unloaded, on flat ground.
For a pump system, set it to the lowest load current (i.e., the current
running at the minimum load). Alternatively, the responsiveness of a pump
speed control loop can be significantly enhanced by using a VCL program
to continuously update this parameter to the appropriate value as each
pump load is requested.
Build Rate 0.1–5.0 sec Determines how fast the Kvff term builds up.
Vel_FF_Build_Rate_SpdM 100–5000 For traction systems, if you feel or hear the mechanical slop pick up
abruptly when you move the throttle from neutral to a very small value,
slowing the build rate (i.e., setting it to a higher value) will soften the feel.
For a pump system, start with this parameter at the minimum setting.
Slowing it down (i.e., setting it to a higher value) will reduce speed over
-
shoot if too much feedforward has been commanded.
Release Rate 0.1–2.0 sec Determines how fast the Kvff term releases. If the release seems too abrupt,
Vel_FF_Release_Rate_SpdM 100–2000 slowing the release rate (i.e., setting it to a higher value) will soften the feel.
It should be set fast enough (i.e., at a low enough value) to prevent the
vehicle from running on after throttle release.