3.3.8 1-6* Load Depend. Setting
1-60 Low Speed Load Compensation
This parameter is not visible on the LCP.
Range: Function:
100 %* [0 - 300 %]
NOTICE
Parameter 1-60 Low Speed Load
Compensation has no eect
when parameter 1-10 Motor
Construction = [1] PM, non-
salient SPM.
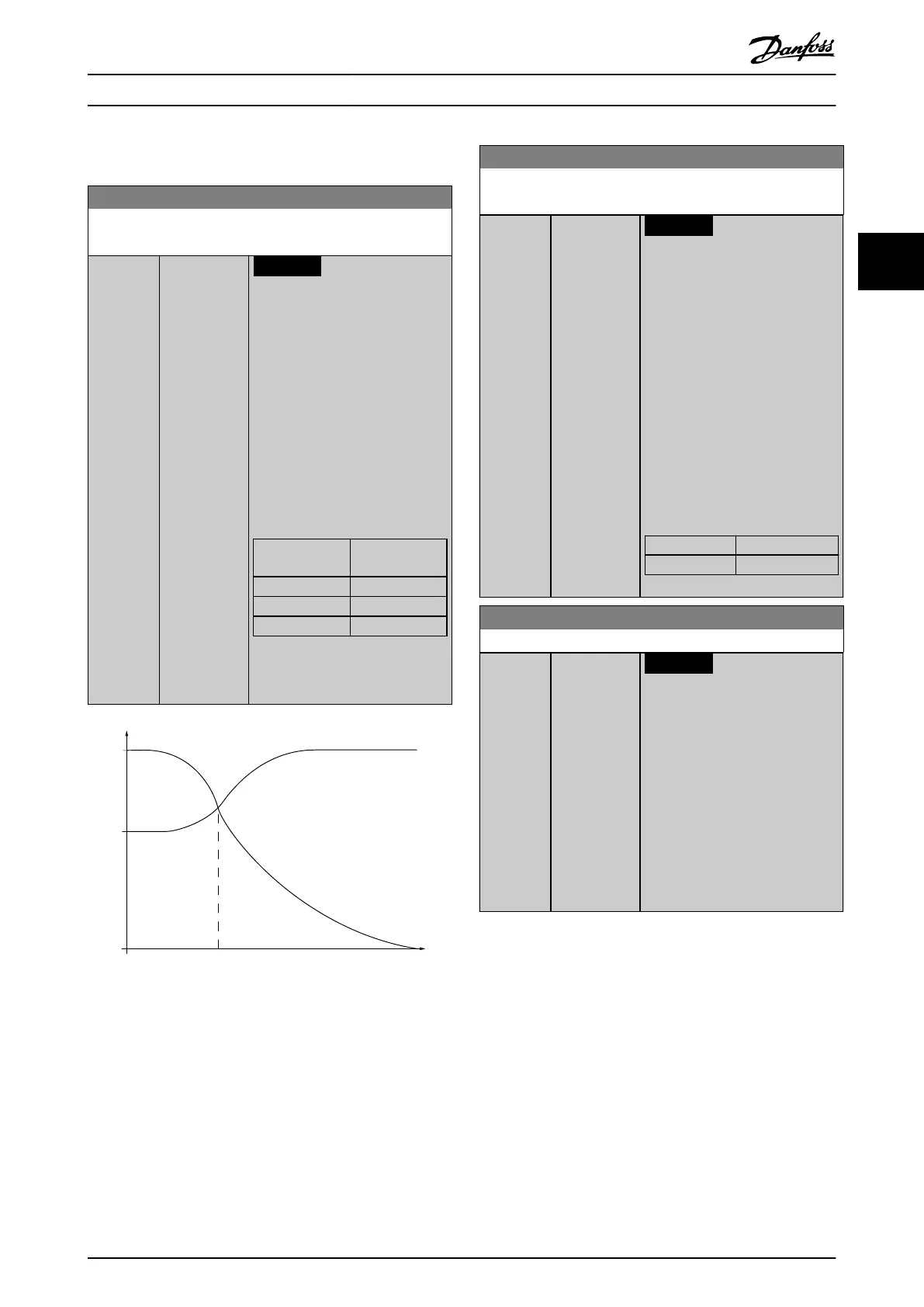
Enter the % value to compensate
voltage in relation to load when the
motor is running at low speed, and
obtain the optimum U/f charac-
teristic. The motor size determines
the frequency range within which
this parameter is active.
Motor size [kW]
Changeover
[Hz]
0.25–7.5 <10
11–45 <5
55–550 <3–4
Table 3.8 Low-speed Load
Compensation
130BA046.11
60%
0%
100%
U
m
Changeover
f
out
Par.1-60 Par.1-61
Illustration 3.9 Low-speed Load Compensation
1-61 High Speed Load Compensation
This parameter is not visible on the LCP.
Range: Function:
100 %* [0 - 300 %]
NOTICE
Parameter 1-61 High Speed
Load Compensation has no
eect when
parameter 1-10 Motor
Construction = [1] PM, non-
salient SPM.
Enter the % value to compensate
voltage in relation to load when the
motor is running at high speed,
and obtain the optimum U/f
characteristic. The motor size
determines the frequency range
within which this parameter is
active.
Motor size Changeover
1.1–7.5 kW >10 Hz
1-62 Slip Compensation
Range: Function:
0 %* [-500 -
500 %]
NOTICE
Parameter 1-62 Slip Compen-
sation has no eect when
parameter 1-10 Motor
Construction = [1] PM, non-
salient SPM.
Enter the % value for slip compen-
sation to compensate for tolerances
in the value of n
M,N
. Slip compen-
sation is calculated automatically,
based on the rated motor speed
n
M,N
.
Parameter Descriptions Programming Guide
M0010001 Danfoss A/S © 10/2019 All rights reserved. 61
3 3
 Loading...
Loading...