Chapter 7 Temperature Measurement Module AS04/08TC
7- 25
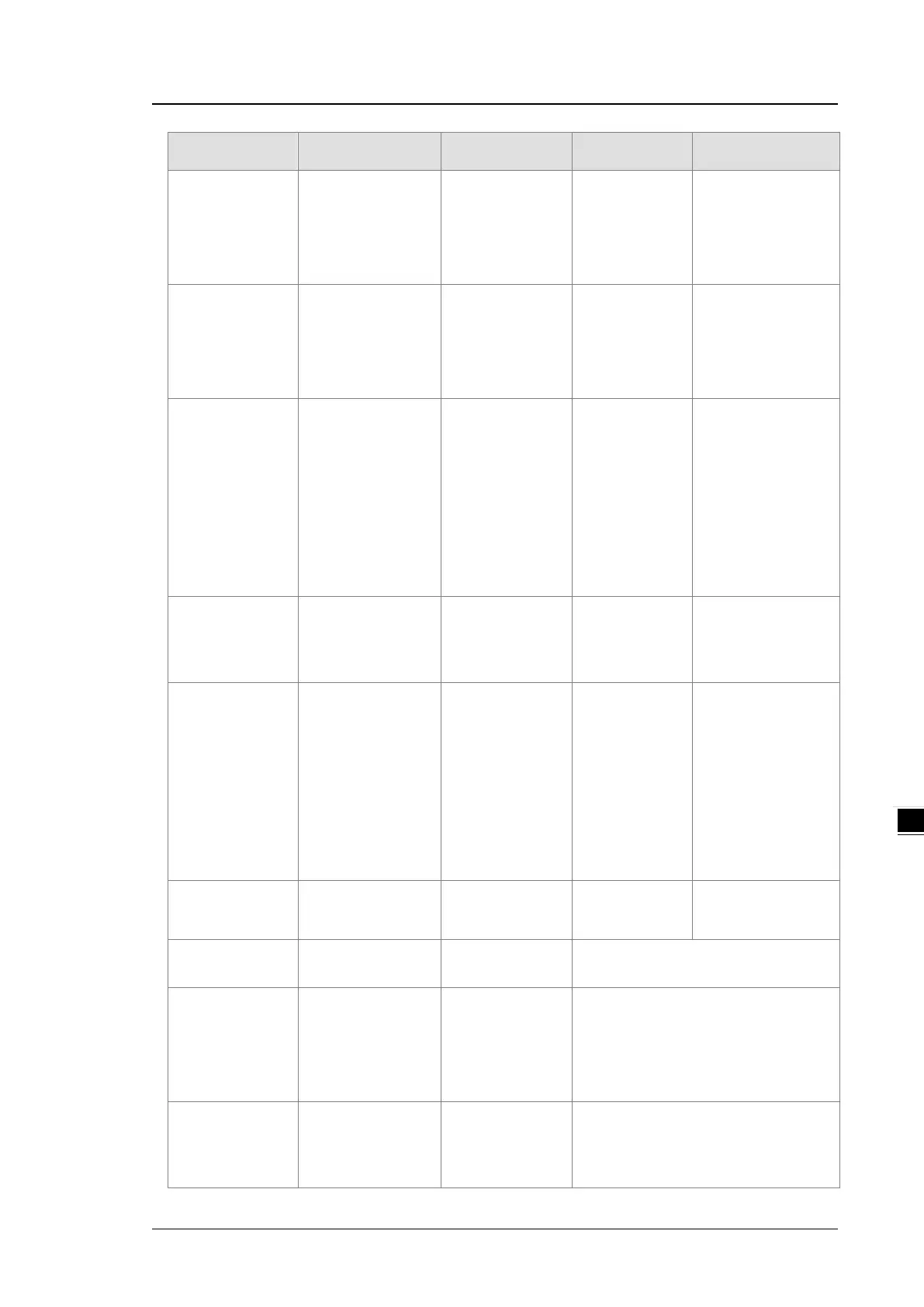
Operand Data type Function Setting range Description
ALPHA DWORD/DINT
Initial value
compensation of
integral calculus
(for heating up)
0.0~100.0
(unit: 1%)
Initial value
compensation of
integral calculus (for
heating up)
BETA DWORD/DINT
Initial value
compensation of
integral calculus
(for cooling down)
0.0~100.0
(unit: 1%)
Initial value
compensation of
integral calculus (for
cooling down)
MOUT DWORD/DINT MV
0~1000
(unit: 0.1%)
When set to PID
Manual
(PID_MAN=True),
the MV value is
outputted as the
value set manually
for MOUNT.
BIAS DWORD/DINT
Feed forward
output value
-32768~32767
Feed forward output
value, used for the
PID feed forward.
CYCLE DWORD/DINT Sampling time (T
S
)
1~1000
(unit: 100 ms)
When the
instruction is
scanned, use the
PID algorithm
according to the
sampling time, and
refresh MV.
MV REAL MV output value
0.0~100.0
(unit: 1%)
PV DWORD/DINT/REAL Present value Format is defined in HWCONFIG.
I_MV REAL
Accumulated
integral value
Accumulated integral value is for
reference. When the MV is out of the
range of 0-100%, the accumulated
integral value in I_MV stops changing.
ERROR DWORD/DINT
Error / status
codes
16#0000:instruction is being executed
and is working normally
16#1400:the module you are using

 Loading...
Loading...