Chapter 5 CANopen Operation Mode ASDA A2-E
5-2 Revision April, 2015
5.1.3 Advanced Setting Procedures
1. Host could obtain more information about profile position mode.
Read 【Position demand value:6062
h
】to obtain the internal position command.
(unit: PUU)
Read 【Position actual value*:6063
h
】to obtain the actual position value. (unit:
increments)
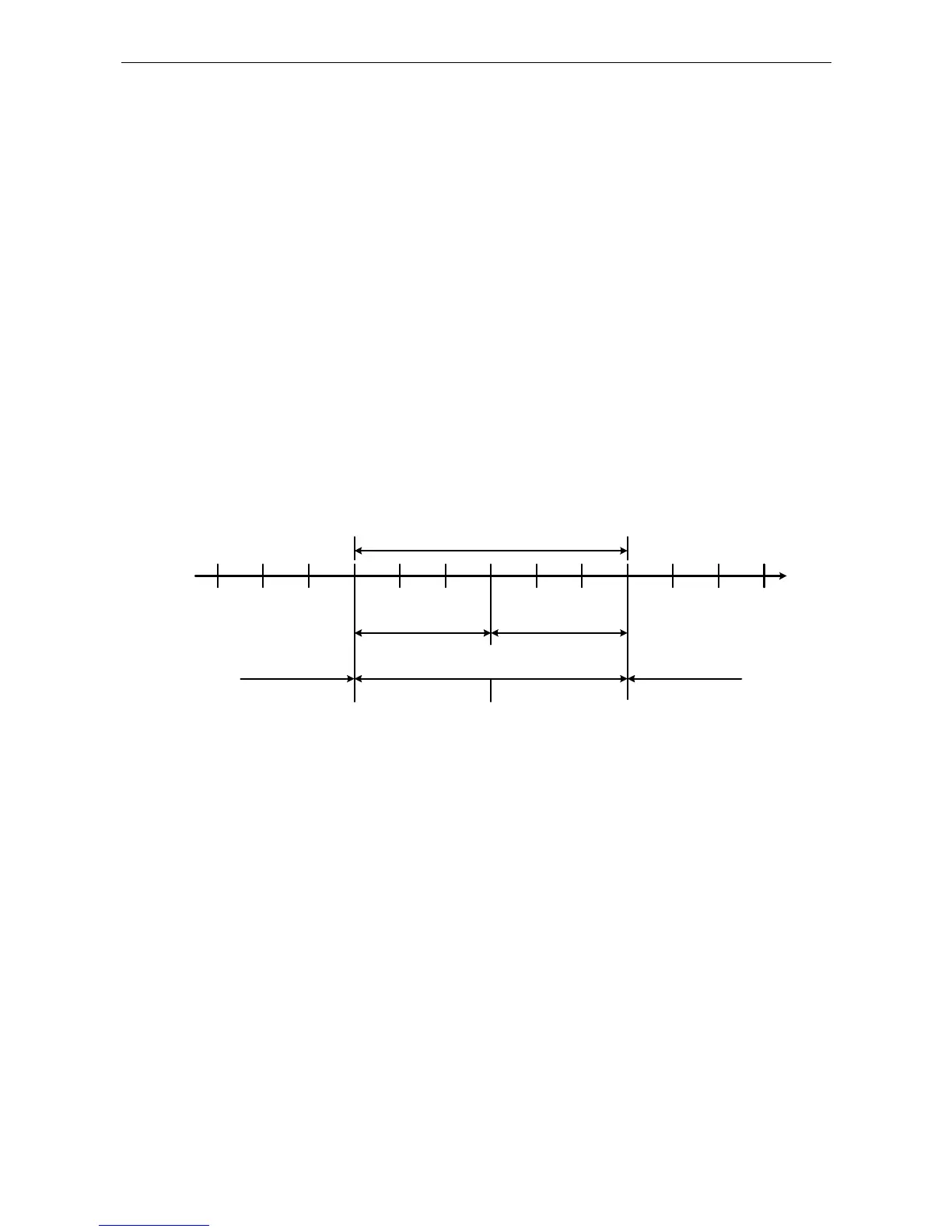
2. Following error
Set 【Following error window:6065
h
】 to define the range of tolerated position
value, which also defines the range of the position demand value. (unit: PUU)
Read 【Following error actual value:60F4
h
】to obtain the actual value of the
following error. (unit: PUU)
following error
following error
window
position
no following error
reference position
following error
accepted following error tolerance
following error
window
Reference position
3. Position window
Set 【Position window:6067
h
】to define a symmetrical range of the accepted
positions which is relative to the target position. (unit: PUU)
Set 【Position window time:6068
h
】to plan activation time of target reached.
(unit: millisecond)