Chapter 5 CANopen Operation Mode ASDA A2-E
5-4 Revision April, 2015
5.2 Interpolation Position Mode
5.2.1 Description
The Host sends PDO periodically. With each PDO, the Host sends the next reference
Xi, differece△X
i
and controlword to the drive. While the next SYNC0 is receiving, the
drive interpolates from X
i-1
to X
i
.
Extrapolation, Jitter Compensation
- When PDO is delayed, the interpolator will predict the speed and position for
the next time according to the last acceleration.
- When PDO delays for 2*cycle, the Drive should stop and send out an error
message.
PDO Rx/Tx Mapping record
- The Drive receives PDOs from the Host
32 bit reference position [position increment]
16 bit symmetrical difference [increments]
△X
i
= (X
i+1
– X
i-1
)/2 (It is also the same as velocity.)
16 bit controlword
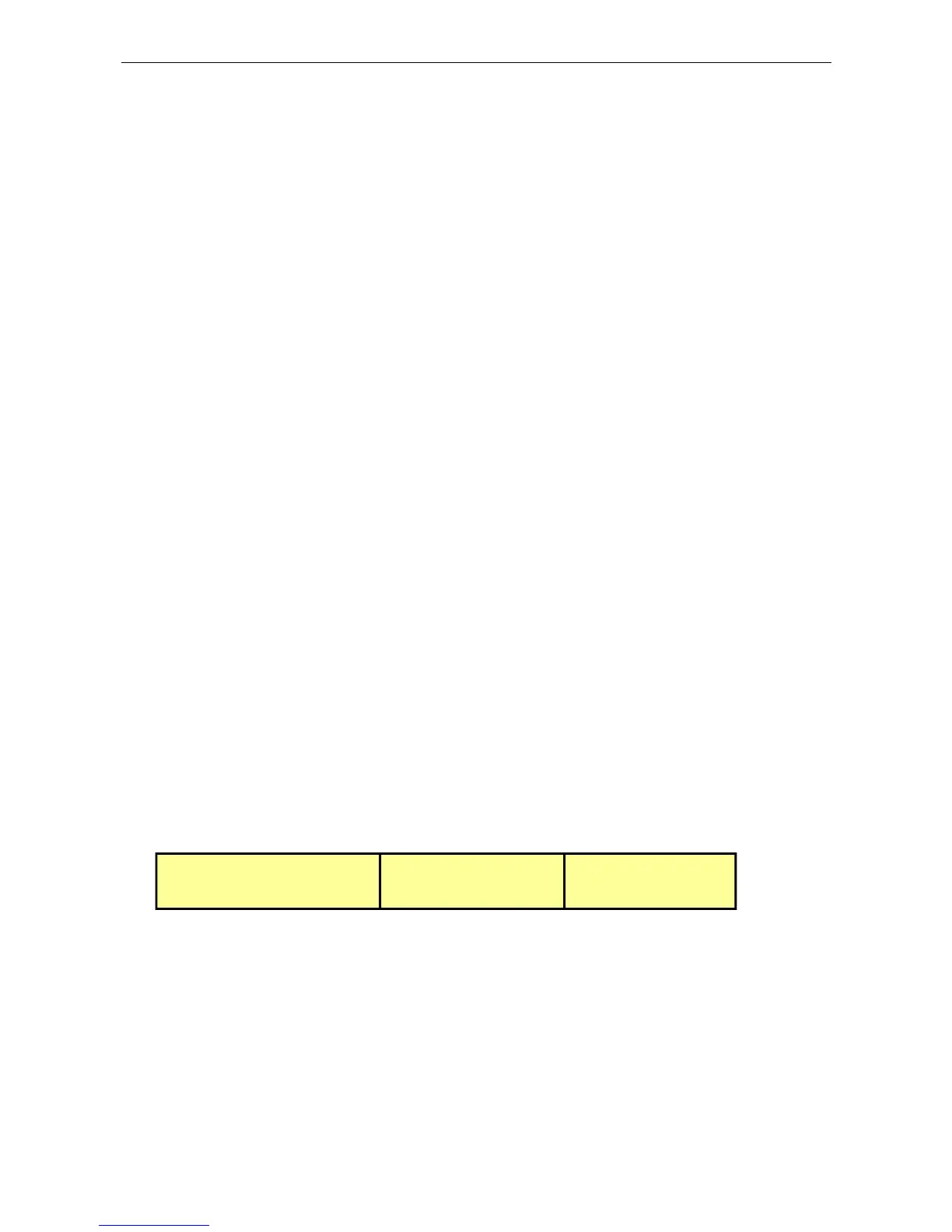
The Drive receives PDOs from the Host (Every PDO contains 8 bytes field which is
shown as below.)
32 bit reference position 16 bit difference 16 bit controlword