Chapter 9 Troubleshooting ASDA-B2
9-6 Revision May, 2018
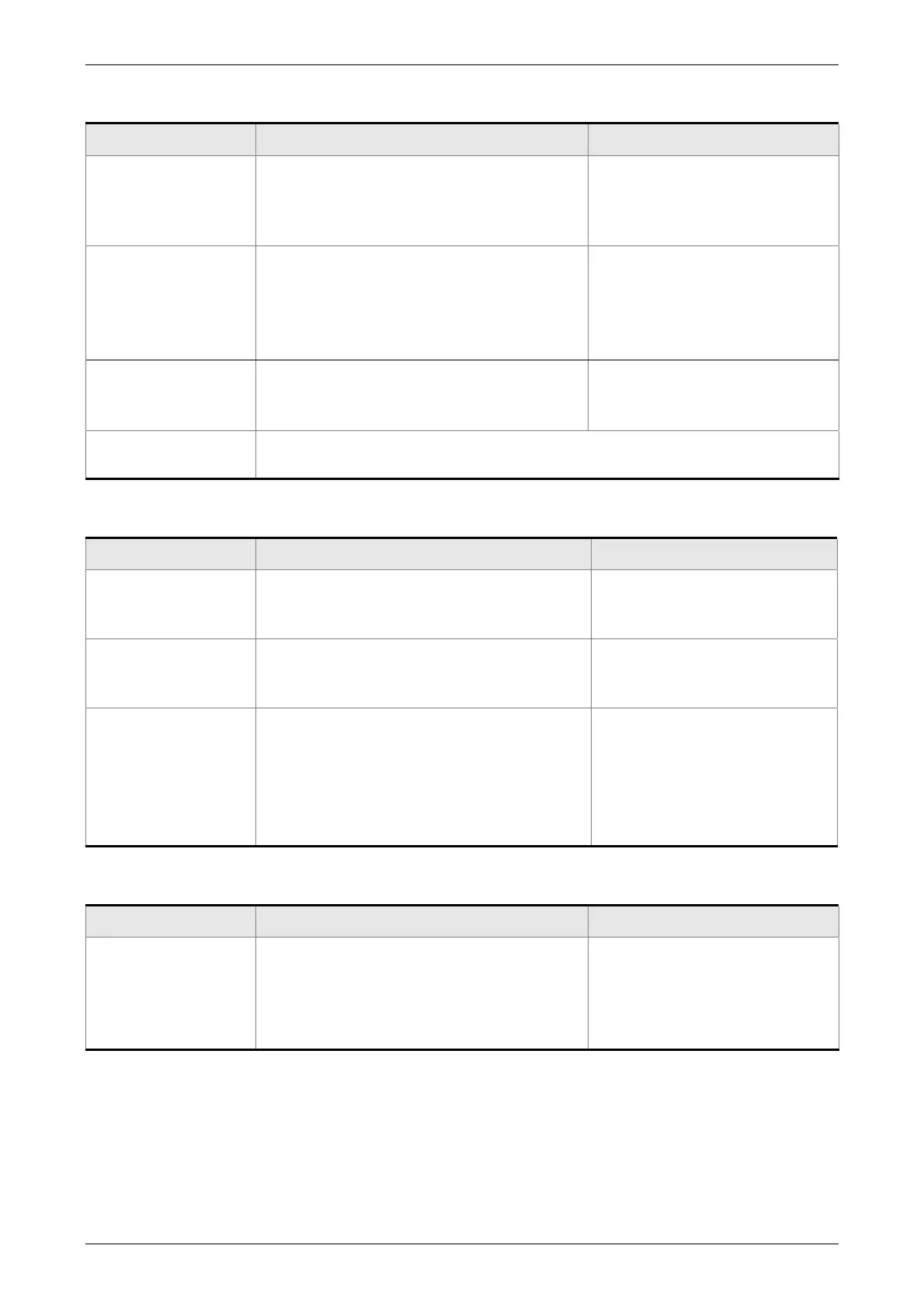
AL006: Overload
Causes Checking Method Corrective Actions
Over the rated
loading of the drive
and continuously
excessive using
Set parameter P0-02 to 11 and see if
the average torque [%] is over 100% all
the time.
Increase the motor capacity
or reduce the load.
The setting of the
control system
parameter is
inappropriate.
1. Check if there is any mechanical
vibration.
2. Check if the acceleration /
deceleration constant are set
too fast.
1. Adjust the gain value of
the control circuit.
2. Slow down the
acceleration /
deceleration setting time.
Wrong wiring of the
motor and the
encoder.
Check the wiring of U, V, W and the
encoder.
Correct wiring
The encoder of the
motor is defective.
Send the drive back to the distributors or contact Delta.
AL007: Overspeed
Causes Checking Method Corrective Actions
Unreasonable
command
Use the scope to check if the signal of
analog voltage is abnormal.
Less steep command used
or filter applying to smooth
command.
Inappropriate
parameter setting
Check if the setting of parameter P2-34
is too small (the condition of over-speed
warning).
Correctly set parameter
P2-34 (the condition of
over-speed warning).
Torque limit
1. Check if DI:TRQLM (torque limit) is
enabled.
2. Check if the torque limit default of
P1-02 is enabled.
3. Check if there is any torque limit
setting for P1-12 ~ P1-14.
1. Disable torque limit DI.
2. Disable the default
setting.
3. P1-12 ~ P1-14 = 100%
AL008: Abnormal pulse command
Causes Checking Method Corrective Actions
The pulse
command
frequency is higher
than the rated input
frequency.
Use the scope to check if the input
frequency is over the rated input
frequency.
Correctly set the input pulse
frequency.
 Loading...
Loading...






