VFD-MS300/MH300 EtherNet/IP Communication Card CMM-EIP01
CMM-EIP01 Operation Manual
28
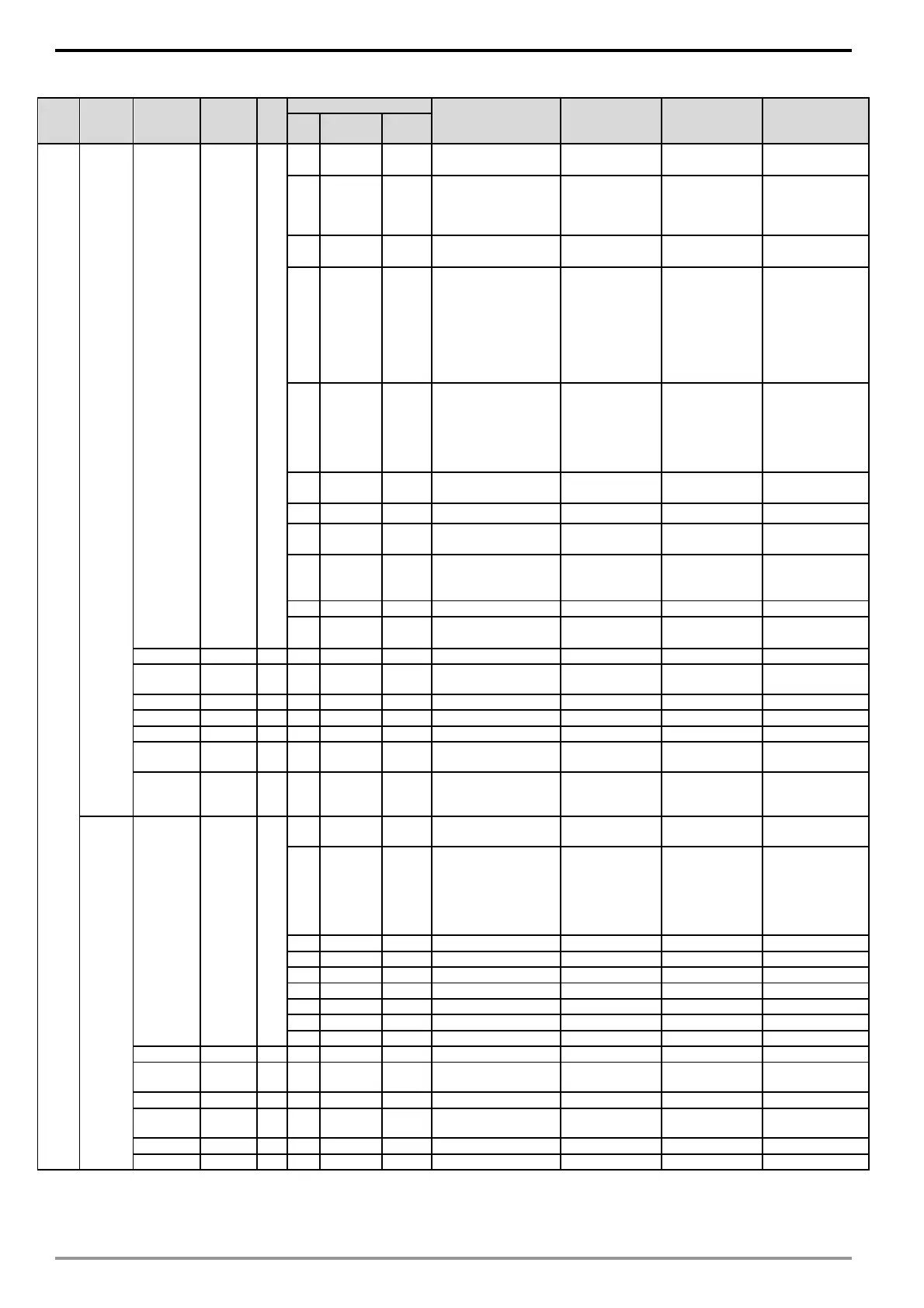
Delta-defined portion (new definition 0x60xx)
Object Instance Attributes Attributes Size
Description
Speed mode
(MS300/MH300)
Torque mode
(MH300)
bit Definition
User
rights
0x300
0x60
0x00 RW U16
0 Ack 4
0:fcmd =0
1:fcmd= Fset(Fpid)
1 Dir 4
0: Clockwise direction
command
1: Counterclockwise
direction command
2
3 Halt 3
0: Continue to run
until target speed is
reached
Regarded as
torque by internal
decoding; target
torque 0, but the
display of external
target torque
remains the value
set externally
1: Temporarily stop
based on
deceleration
settings
4 Hold 4
0: Continue to run
until target speed is
reached
1: Frequency remains
constant at the
current level
5 JOG 4
0:JOG OFF
Pulse 1:JOG RUN
6 QStop 2 Quick Stop Quick Stop
7 Power 1
0:Power OFF 0:Power OFF
1:Power ON 1:Power ON
8 Ext_Cmd2 4
0->1:
Clear absolute
position
0->1:
Clear absolute
position
14~8
15 RST 4
Pulse 1: Pulse 1:
Clear error code Clear error code
0x01 RW U16 Mode md 0: Speed mode 2: Torque mode
0x02 RW U16
Speed command
(unsigned number)
0x03 RW U16
0x04 RW S32
0x05 RW
0x06 RW S16
Torque command
(signed number)
0x07 RW U16
Speed limit
(unsigned
number)
0x61
0x00 R U16
0 Arrive
Frequency command
arrival
Torque command
attained
1 Dir
0: motor in clockwise
rotation
0: motor in
clockwise
rotation
1:motor in
counterclockwise
rotation
1:motor in
counterclockwis
e rotation
2 Warn Alarm raised Alarm raised
3 Error Error occurred Error occurred
4
5 JOG JOG JOG
6 QStop Quick stop Quick stop
7 Power On Excitation Excitation
15~8
0x01 R
0x02 R U16
Actual output
frequency
Actual output
frequency
0x03 R
0x04 R S32
Actual position
(absolute)
Actual position
(absolute)
0x05 R
0x06 R S16 Actual torque Actual torque