AiStarter User Guide 5User Operation
IssueV1.0.3(2018-09-01) AiStarter User Guide Copyright © Yuejiang Technology Co., Ltd
14
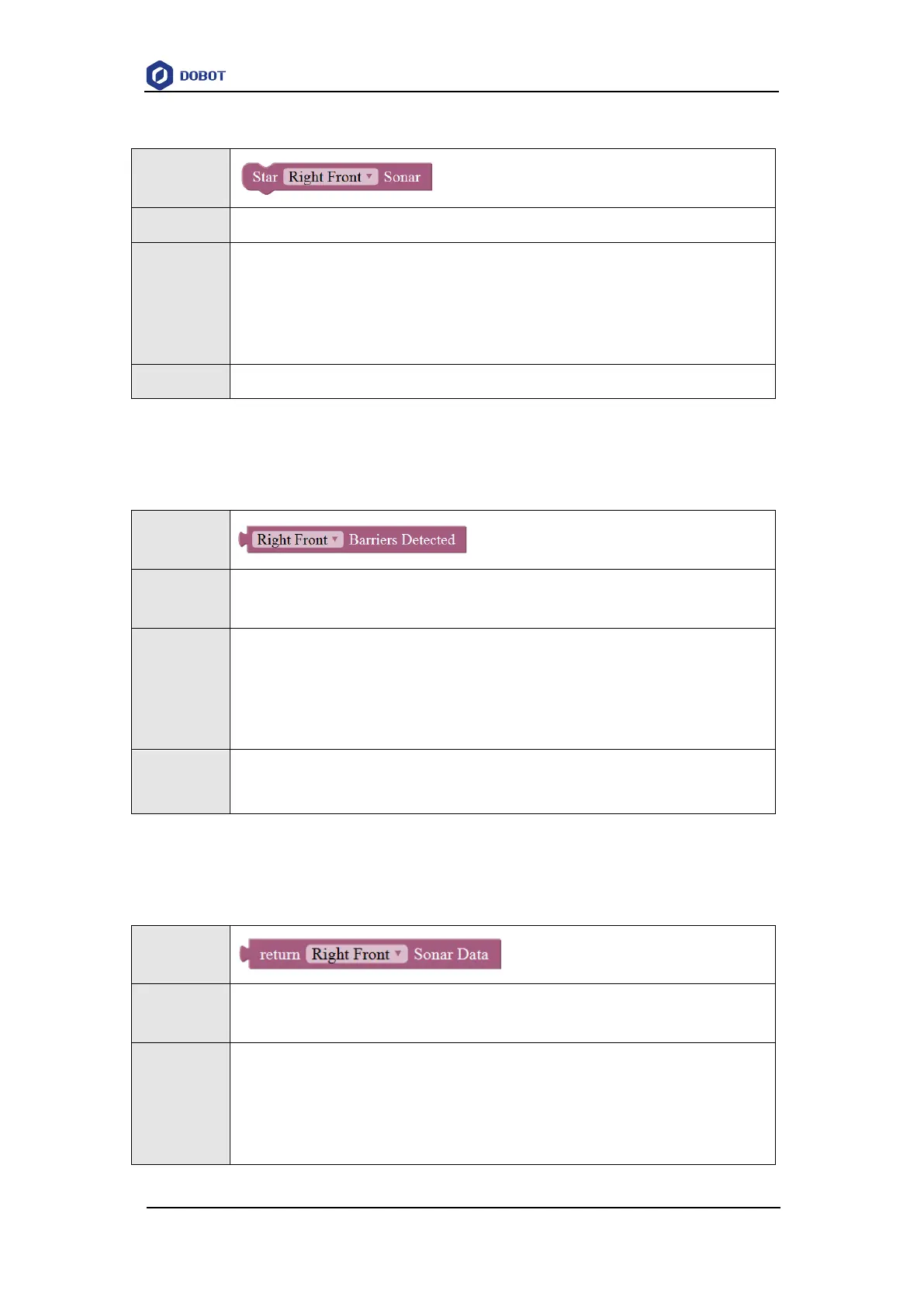
Table 5.4 Start AiStarter sonar
This module is used to start AiStarter sonar
Sonar position:
Right Front
Front
Left Front
5.3.5 Detecting Barrier
Table 5.5 Detect barrier
This module is used to detect whether a barrier is exist in front of AiStarter, before calling this
module, please start the corresponding sonar
Obstacle position:
Right front
Front
Left front
Return 1: There is a barrier
Return 0: There is no barrier
5.3.6 Getting The Detection Distance of Sonar
Table 5.6 Get the detection distance of sonar
This module is used to get the detection distance of sonar, which is the distance between
AiStarter and barrier.
Sonar position:
Right front
Front
Left front