Version 2.02 15.05.2007
Function of VS 3000
29
eckelmann.de
E 2007 - ECKELMANN AG | BERLINER STRASSE 161 | 65205 WIESBADEN | TELEFON +49(0)611 71 03-0 | FAX +49(0)611 71 03-133
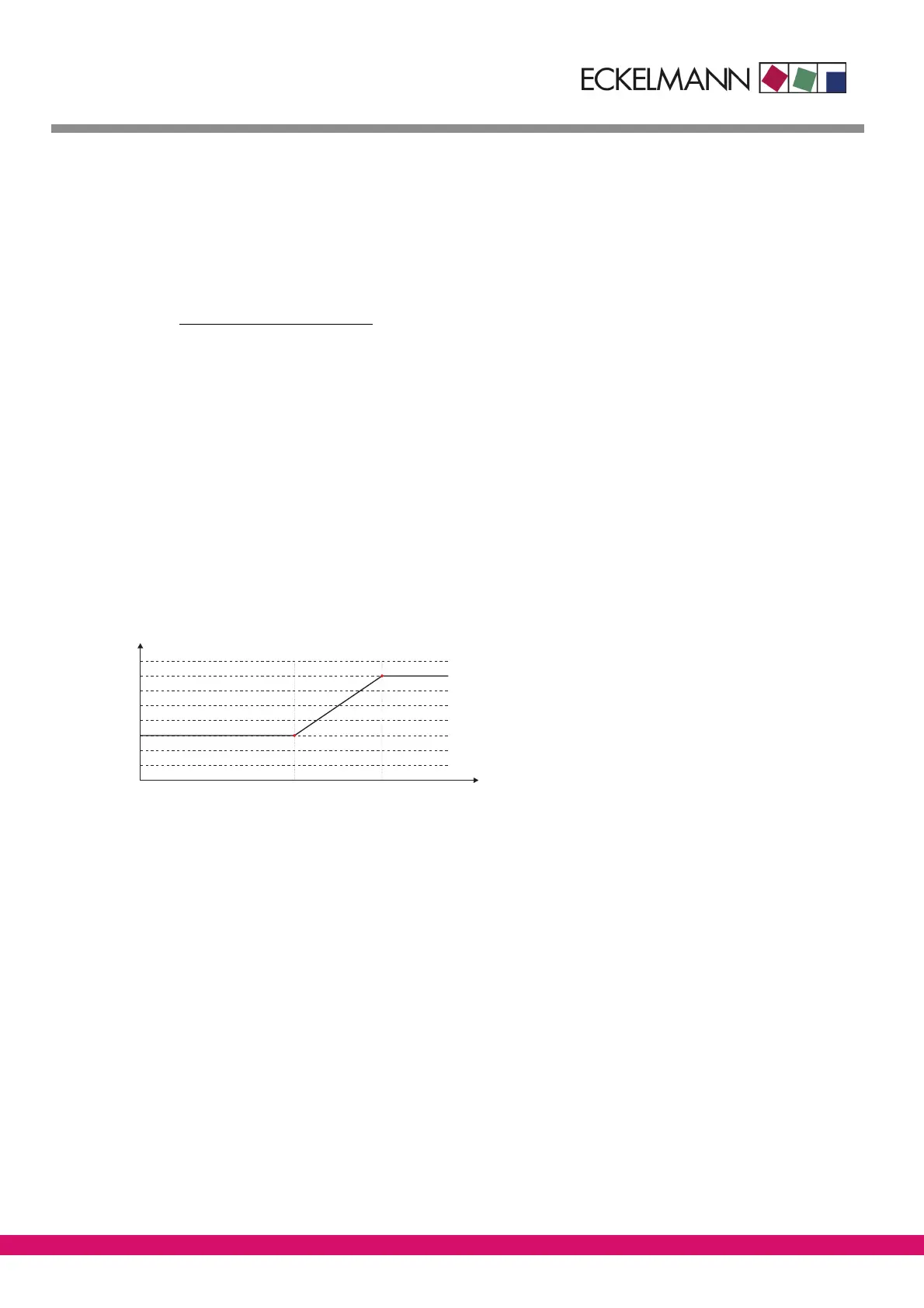
3.27.5 Calculating setpoint with step controller
The setpoint for t
c
is determined by a programmable characteristic as a function of outdoor temperature. Outdoor tem-
perature is supplied either by a PT1000 sensor connected direct to an input of the pack controller or via the CAN bus
by another pack controller in the system.
t
c
= t
c_min
+
t
c_max
− t
c_min
⋅
t
a
− t
a_min
t
a_max
− t
a_min
=t
c
setpoint
t
c_max
= Maximum t
c
setpoint
t
c_min
= Minimum t
c
setpoint
t
a
= Current outdoor temperature
t
a_max
= Max. outdoor temperature for setpoint shift
t
a_min
= Min. outdoor temperature for setpoint shift
Given an outdoor temperature of t
a
>t
a_max
or t
a
<t
a_min
the following applies:
For t
a
>t
a_max:
t
c=
t
c_max
For t
a
<t
a_min:
t
c=
t
c_min
ZNR. 51203 65 230 E0
Condensing temperature [°C]
Temperature outside [°C]
VS 3000 HP control setpoints determination
0
10
20
30
-5 0 5 10 15 20 25
t
c
40
30 35 40
-10
t
c max
t
c min
t
a max
t
a min
Temperatures t
c_min
,t
a_min
,t
c_max
,t
a_max
are definable.
The pressure setpoint for actual control is determined from a conversion table stored in the program. Consider -
ation is given to all currently used refrigerants when converting t
c
to the corresponding pressure value (see Sec -
tion 3.6.1).
3.27.6 Condenser fan control times with step controller
If the condensing pressure rises or falls to a value outside the neutral zone, the first condenser capacity stage is im-
mediately loaded or unloaded. Every further actuation takes place only after a certain time has elapsed for loading or
unloading and the control error has exceeded a specified value (neutral zone).
The time is dependent on the actual control error. Actuation takes place in a shorter time with a large control error than
with a smaller control error. The control time is calculated as the sum of a basic time t
b
and a variable time t
v
.Differ-
entiation is made between forward and back switching of the step controller.
The variable time is inversely proportional to the control error. With maximum control error the variable time t
v
ap-
proaches zero. As the control error decreases, time t
v
automatically increases up to the specified maximum.