Theory of Operation 2-11
CadJet 3D Service Manual
THEORY OF
OPERATION
Servo Motor Controller
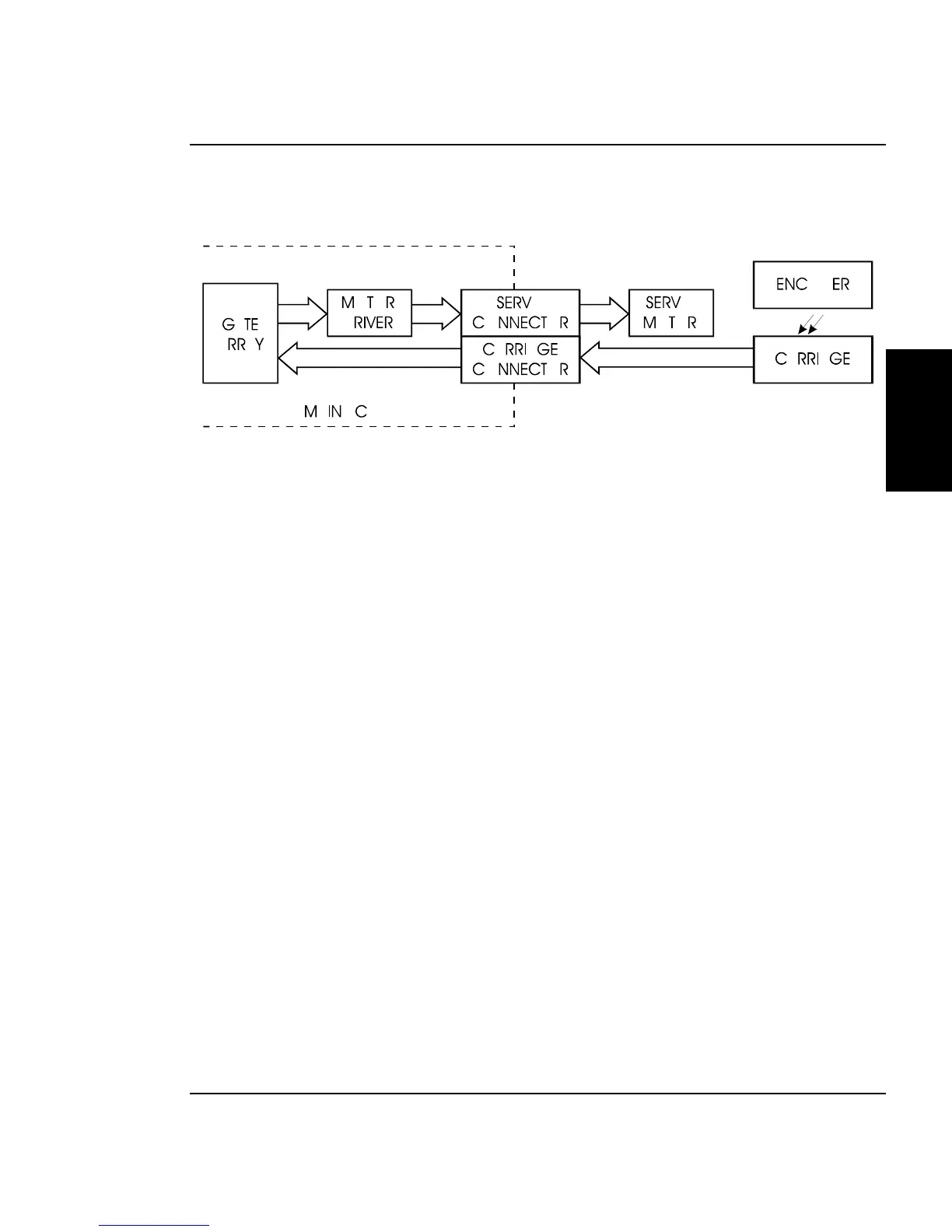
Figure 2-7. Servo Motor Controller.
The Carriage Assembly is driven by the Servo Motor. The speed of the
Carriage Assembly is controlled by varying the duty cycle of the signal
applied to the controller. The microprocessor checks the position of the
Carriage Assembly approximately 1,000 times per second (during the
servo interrupt). It then updates the PWM (pulse width modulator)
register in the gate array which sets the duty cycle to make adjust-
ments to the Carriage Assembly speed. A linear optical encoder is used
to monitor the Carriage Assembly position.
The optical encoder strip runs the length of the Stabilizer Bracket and
contains 150 lines and spaces per inch. Thus there are 300 edges per
inch.
The detector circuit actually consists of two optical edge detectors. They
are separated from each other by one half the width of one of the optical
lines on the encoder strip. This allows 4 evenly spaced pulses to be
developed for each line on the encoder strip.
This is known as quadrature signals. It gives an effective resolution of
600 lines per inch. See Figure 2-8 for a graphical representation of
quadrature signals. For 300 dpi resolution, one of the detectors is not
used.
 Loading...
Loading...