6Functions
Festo – GDCP-CMMP-M0-FW-E N – 1304N H 27
Example
For positioning record “4”, the following are established as subsequent positio ns:
– N EXT1 := “19” ( Z DIN0
}
1)
– N EXT2 := “20” ( Z DIN1
}
1)
Through the I/O configuration, the subsequent positions are logically linked to the digital inputs DIN0
and DIN1. Corresponding to the established continuation condition, the following positioning beha-
viour results:
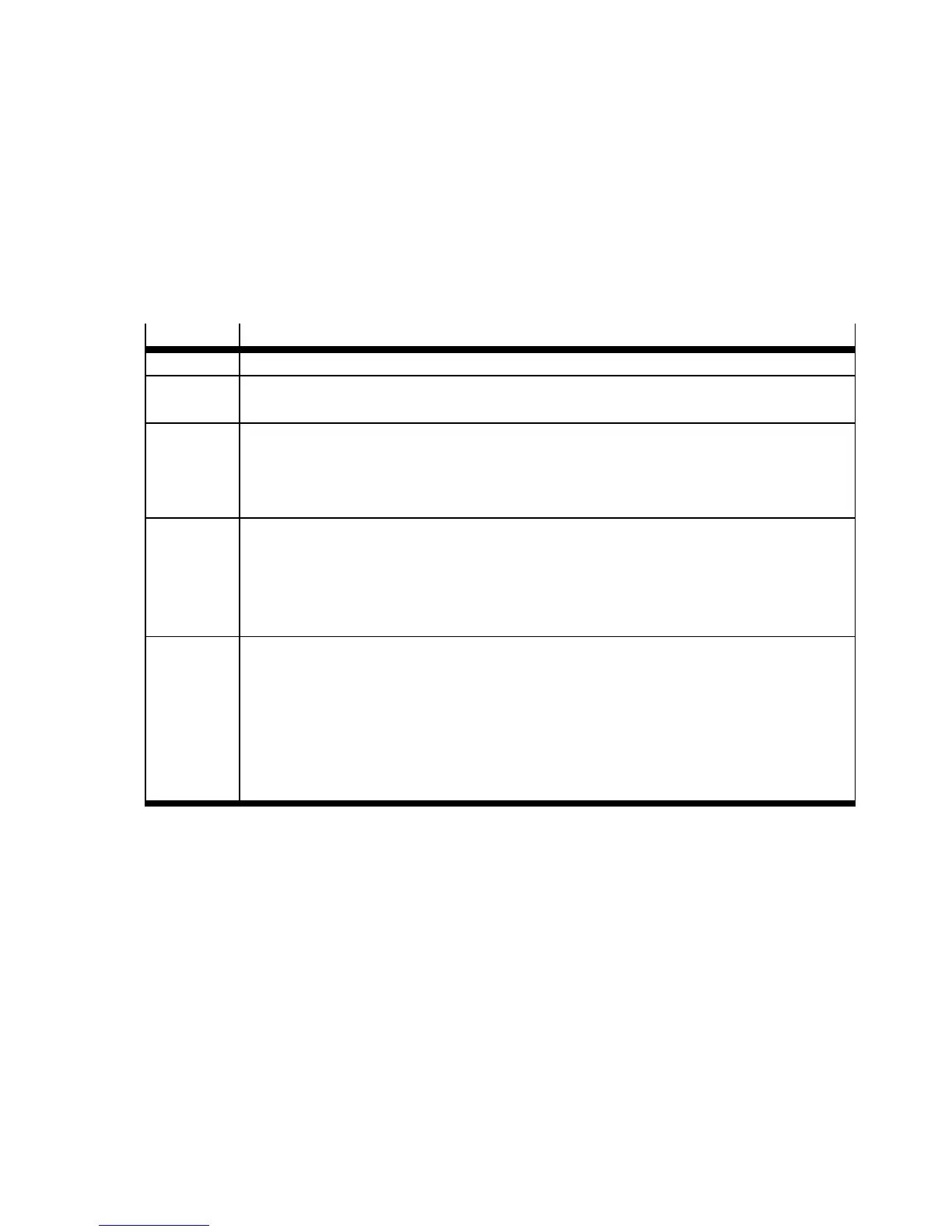
Command
Continuation condition (example)
END After position 4 is reached, record continuation is ended.
GoFP1 Signal edges 0
}
1 at input DIN0 or DI N1 are not evaluated. After position 4 is reached,
position 19 is travelled to immediately.
IgnUTP As long as position 4 has not been reached yet, edge changes at DI N0 and DI N1 are
ignored. If position 4 is reached, a rising edge at input
–NEXT1(DIN00
}
1) c auses approach of the target position 19
–NEXT2(DIN10
}
1) an approach of the target position 20.
GoImm Signal edges 0
}
1 at input DIN0 or DIN1 are evaluate d during the positioning proc ess.
With an ac tive positioning edge at input NE XT1 or NEXT2, the ongoing positioning is
cancelled and
–NEXT1(DIN00
}
1) c auses approach of the target position 19
–NEXT2(DIN10
}
1) causes the target position 20 to be approached.
GoATP – As long as position 4 has not been reached yet, edge c hanges at DIN0 and DIN1 are
recorded; positioning is not interrupted. During the ongoing positioning, first a sig-
nal edge appea r s at DIN0 0
}
1, after that an edge at DIN1 0
}
1. After target posi-
tion 4 is reache d, posit ioning is started to Pos. 20.
– If position 4 is reached before an edge occ urs, a rising edge at input:
–NEXT1(DIN00
}
1) c auses approach of the target position 19
–NEXT2(DIN10
}
1) an approach of the target position 20.
Tab. 6.5 Continuation condition (example)
6.1.6 Modulo positioning
“Modulo” positioning can be pe rformed for timed endless movements ( e.g. co nveyor belts, rotary in-
dexing tables). This enables endless movements to be implemented without losing the position refer-
ence to the zero point of the measuring reference system.
Selection for the modulo positioning is possible for the following axis configurations:
– Rotative axis with unlimited positioning range
– User-defined linear axis - type “conveyor belt”

 Loading...
Loading...










