• The default values for the ASR can be used in most applications, no adjustment is required. Adjusting the
low-pass lter time and speed estimator gains requires a good understanding of the overall system. If a
high-speed system response in combination with stable operation is required consider using SLV or SV
control mode.
• Parameter 20-15 sets the gain switch frequency at low-speed and parameter 20-16 sets the gain switch
frequency at high-speed.
• Operating at a speed below 20-15 will result in a larger excitation current for low-speed operation accuracy.
When the frequency reference rises above 20-16, the inverter will output the rated excitation current at the
no-load voltage (02-19).
• For general purpose applications parameter 20-15 should be set to a value of 5 ~ 50% of the motor base
frequency.
• If this value is too high, the inverter output may saturate. Parameter 20-16 should be set to a value of 4Hz
or more above the value of 20-08.
• When experiencing speed jitter at high speed and stable operation during mid-range speed while operating
a heavy load (>100%), it is recommended to reduce the no-load voltage (02-19) or tune the FOC parame-
ters (18-05 ~ 18-06).
• Parameter 20-17 and 20-18 are for compensating speed feedback at low speed and high speed.
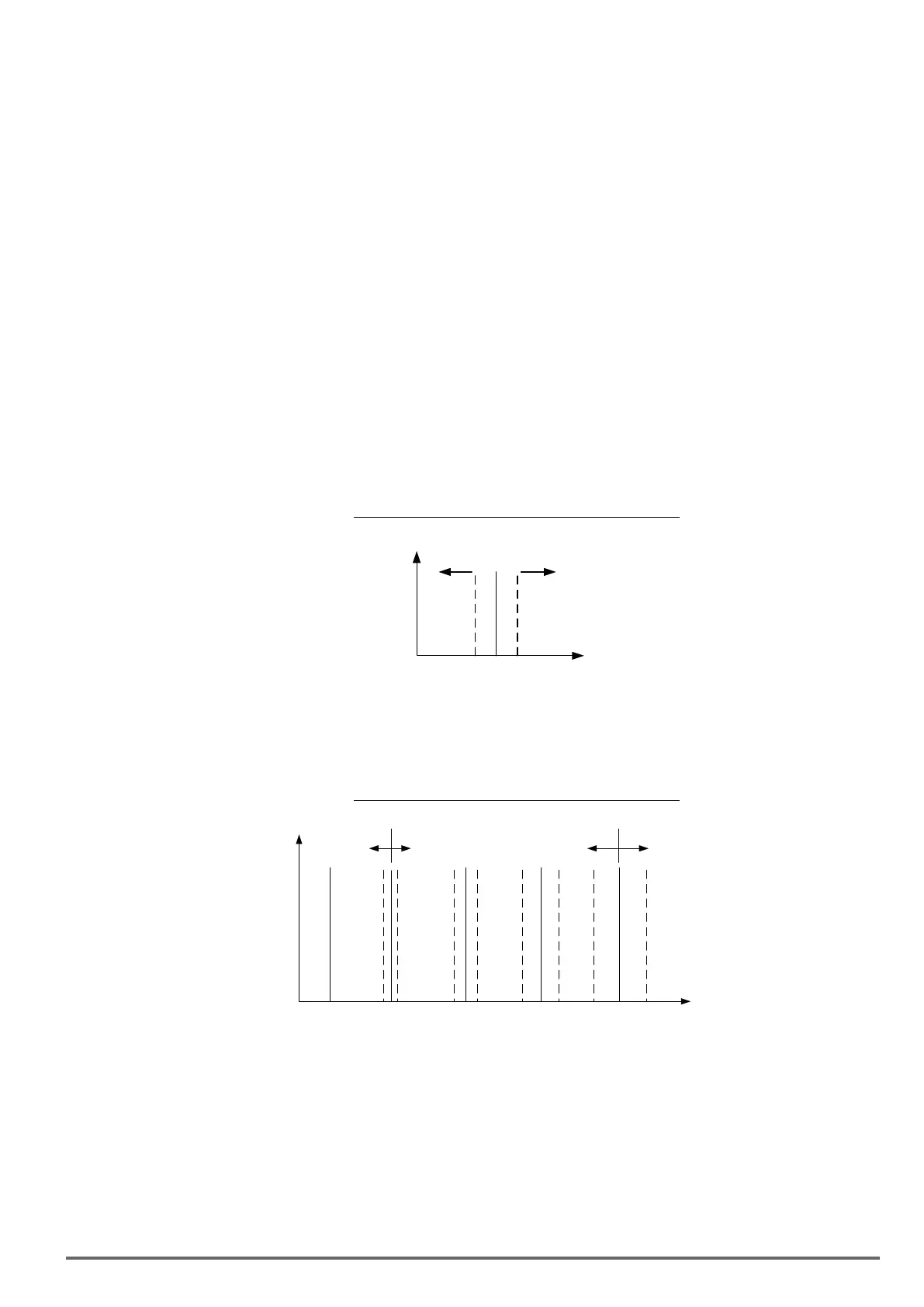
• Use parameter 20-17 to adjust the torque compensation gain for the low speed range. By tuning 20-17an
offset is added to the torque-speed curve. Increase 20-17 when the no-load speed is lower than the fre-
quency reference. Decrease 20-17 when the no-load speed is higher than the frequency reference. The
effect on the torque-speed curve from 20-17 is shown as the following gure.
Figure4.4.115Effectonthetorque-speedcurvefrom20-17
Decrease 20-17 Increase 20-17
Torque
Speed
• Use parameter 20-18 to adjust the torque compensation gain for middle to high speed range. For most
general purpose applications it is not necessary to adjust the 20-18. By tuning 20-18an offset is added to
the torque-speed curve. Increase 20-18 when the no-load speed is lower than the frequency reference.
Decrease 20-18 when the no-load speed is higher than the frequency reference. The effect on the torque-
speed curve from 20-18 is shown as the following gure 4.4.116.
Figure4.4.116Effectonthetorque-speedcurvefrom20-17
Speed
Decrease
20-18
Decrease
20-18
Increase
20-18
Increase
20-18
(1) ASR main delay time (20-08).
a) Does not required to be adjusted for general purpose applications
b) When the set value of 20-08 is set high, the speed response will and therefore system response will de-
crease improving system stability.
(2) ASR integral limit (20-04)
a) Setting a small value may prevent system response when the load suddenly changes.
VDI100 • Instruction manual 267

 Loading...
Loading...







