The Velocity Threshold defines a symmetrical range of accepted velocity relatively to the 0. If the motor current
velocity is within the velocity threshold, this 0 velocity is considered as reached (bit 12 of status word - Velocity =
0 – is set). If the velocity threshold value is 0, the velocity threshold control is not active.
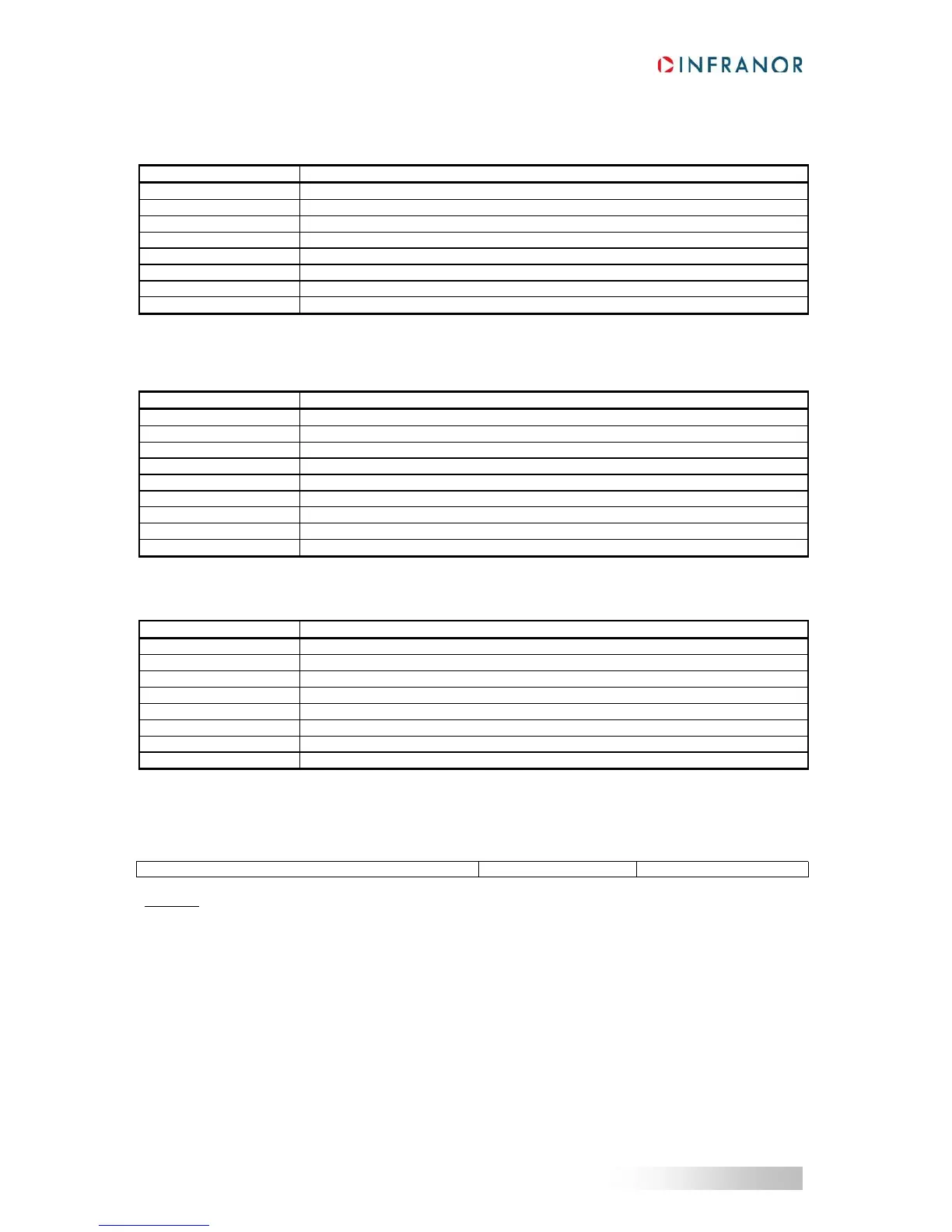
Index 0x606F
Name Velocity Threshold
Object Code VAR
Data Type Unsigned32
Object Class pv
Access rw
PDO Mapping No
Unit Velocity Unit
Default Value 0
When the actual velocity is within the Velocity Threshold during the defined Velocity Threshold Time, the
corresponding bit 12 Velocity=0 in the StatusWord will be set at 1.
Index 0x6070
Name Velocity Threshold Time
Object Code VAR
Data Type Unsigned16
Object Class pv
Access rw
PDO Mapping Possible
Unit ms
Value Range 0...32767
Default Value 0
Profile Velocity Mode Input Source
Index 0x30FF
Name Profile Velocity Mode Input Source for Target Velocity
Description Index/sub-index of input data
Data Type Unsigned32
Class pv
Access rw
PDO Mapping No
Value See below
Default Value 0x60FF0000
This object allows connecting any 32-bit dataflow as target velocity for the Profile Velocity Mode.
The structure of the entries is the following:
MSB LSB
Index (16-bit) Sub-index (8-bit) 0
Example:
0x30FF,0 = 0x30F10200
connects the analog input as the target velocity for Profile Velocity Mode.
 Loading...
Loading...

