Notes:
Some independent status bits may be set and are not represented in the table above. The mask for testing
the status word is 0x026F.
Seq 1 (control word = 0x0000) and seq 3 (control word = 0x0007) may be omitted.
In some operation modes (interpolated position mode, servo mode...), bit 4 of the control word must also be
set after seq 4 to be fully operational. When switching between the modes, it is necessary to reset bit 4 of
control word before changing the mode and then set it afterwards.
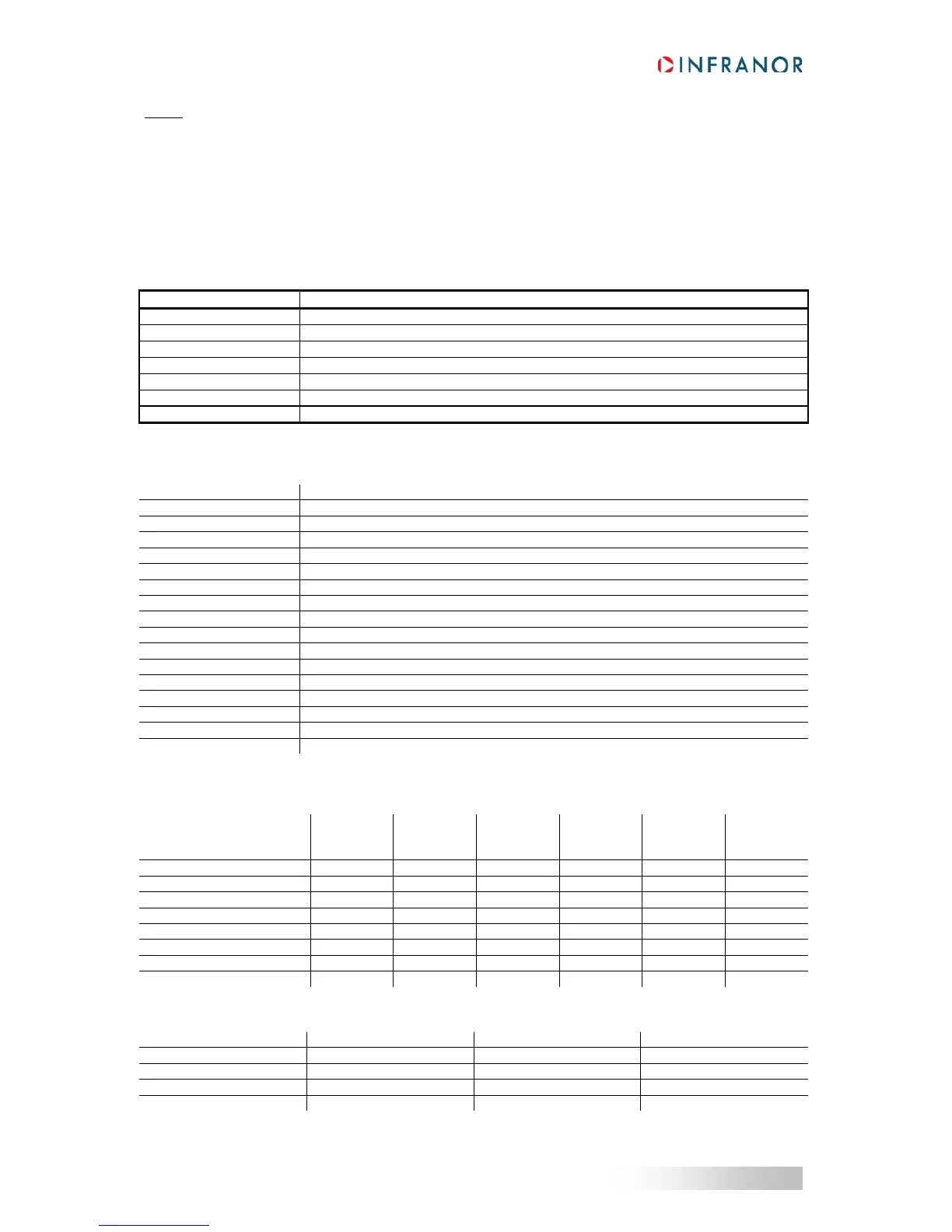
Status Word
Inde
0x6041
Name Status Word
Object Code VAR
Data Type Unsigned16
Object Class all
Access ro
PDO Mapping Possible
Default Value -
The status word indicates the current status of the drive. It is possible to define the TPDO to be transmitted at
every change of the status word (Device Event transmission type).
Bit Numbe
Function
0 Ready to Switch On
1 Switch On
2 Operation Enabled
3 Fault
4 Voltage Enabled
5 Quick Stop
6 Switch On Disabled
7 Warning
8 Manufacturer Specific: user programmable (see object 0x3044)
9 Remote
10 Target Reached
11
12 Operation Mode Specific
13 Operation Mode Specific
14 Manufacturer Specific: user programmable (see object 0x3044)
15 Manufacturer Specific: Drive Busy
Device Status Bit Meaning:
State Bit 6
Switch On
Disable
Bit 5
Quick Stop
Bit 3
Fault
Bit 2
Operation
Enable
Bit 1
Switched
On
Bit 0
Ready to
Switch On
Not Ready to Switch On 0 X 0 0 0 0
Switch On Disabled 1 X 0 0 0 0
Ready to Switch On 0 1 0 0 0 1
Switched On 0 1 0 0 1 1
Operation Enable 0 1 0 1 1 1
Fault 0 X 1 0 0 0
Fault Reaction Active 0 X 1 1 1 1
Quick Stop Active 0 0 0 1 1 1
Bits 12, 13 are operation mode specific:
Mode Bit 12 Bit 13
Profile Position Mode setpoint acknowledge Following Error
Homing Mode Homing attained Homing error
Interpolated Position Mode Ip-Mode active reserved
Profile Velocity Mode Speed = 0 reserved
 Loading...
Loading...

