COMPLEX RADIO CONTROL SYSTEM
Always stabilise motors - after activating this option, the
multicopter will be stabilised from the moment of arming and
applying the throttle for the first time until the model is disarmed,
which means the motors are switched off. Stabilisation will always
work even with the throttle at idle position. This option is not
recommended for first flights with your
multicopter.
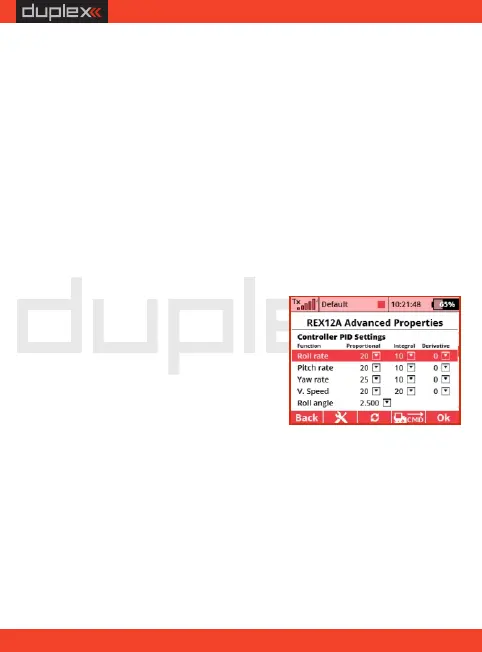
PID fine-tune - If the multicopter
behavior is not entirely ideal, you can
fi ne - tu ne t h e P I D g ai ns of t he
stabi lisati on lo o p for eac h ax is
separately.
step, for example, by 20%). Once the oscillation starts, reduce the
proportional factor by 20%.
Use OneShot125 - check this option to enable OneShot125 mode
for controlling the multicopter speed controllers. This is a special
mode where the pulses from the receiver are 8 times shorter than
standard servo pulses. OneShot125 must also be supported by the
speed controllers in your model.
Proportional coefficient – this is a basic parameter of stabilisation.
The response of the control unit is directly proportional to the
desired rotation speed. If the multicopter is not sufficiently
stabilised in some axis, e.g. the pilot must always interfere with the
steering to keep the model in the air, increase this factor (at each
buttonon the transmitter is pressed.
EN
23