COMPLEX RADIO CONTROL SYSTEM
Continue flying in one place and at low altitude - if the flight is
unstable or oscillation occurs in any axis, land and adjust the gain
of the PID control loop (see the next chapter). Retest the new
setting again in flight.
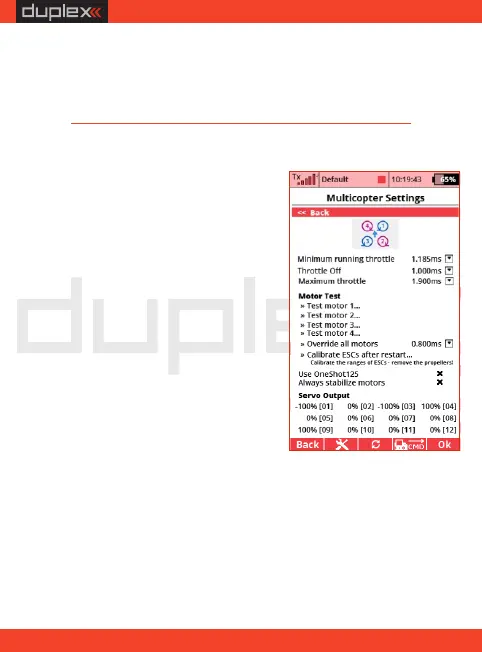
Before your first flight with a multi-
copter model, always test the rotation
direction of the individual motors. In
the receiver configuration, go to the
Multicopter Settings menu. Here,
choose a minimum value for running
throttle to make the motors slowly spin
when the multicpoter is armed. Set
pa ram ete rs „T hr ott le Of f ” a n d
„Maximum throttle” according to the
re co m me nd e d s et tin g f rom t h e
manufacturer of your ESC. Test the
rotation direction of each motor by
activating the command „Test motor”.
The corresponding speed controller
re ce i ve s a c o mm a n d t o r u n a t
minimum revolutions for approxima-
tely 1s. The rotation direction must correspond to the diagram in
the menu on the transmitter display. If the motor rotates in the
opposite direction, swap any two motor leads between each other.
4.2.1. Optimize multicopter settings
Overwrite all motors - you can enter any value from 0.8 to 2.2ms,
which is sent to all motors at the same time after the F4 "Apply"
EN
22