75
11 Optimisation
11.1 Self-optimisation
Procedure Self-optimisation (SO) establishes the optimum controller parameters for PID
or PI controllers.
Depending on the controller type, the following controller parameters can be
defined:
Reset time (Tn1, Tn2), derivative time (Tv1, Tv2), proportional band (Xp1, Xp2),
switching cycle time (Cy1, Cy2), filter time constant (dF)
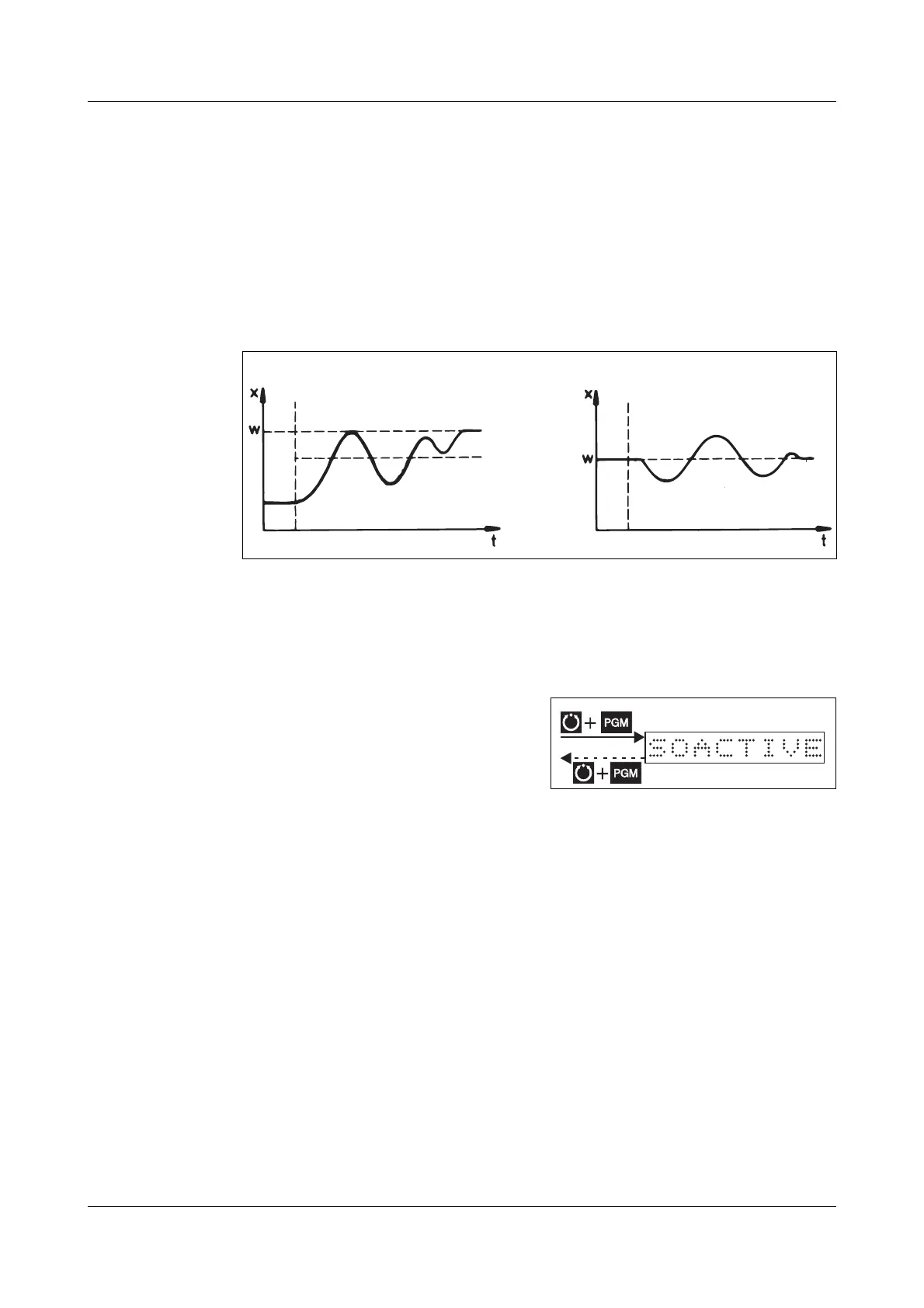
The controller selects one of two procedures (a or b), depending on the size of
the control deviation:
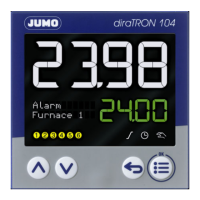
Start of self-
optimisation
Self-optimisation is started from the
manual mode and is automatically ter-
minated, or can be cancelled.
The controller output types have to be defined for self-
optimisation.
v Section 10.1 “Controller”
a) SO in the start-up phase
b) SO at setpoint
Start of SO
Start of SO
Switching
line
It is not possible to start self-optimisation with activated level inhibit.