19
ANTRIEBSTECHNIK
61119
KEB COMBIVERT F4-F
Name: Basis
17.06.99
6
Section PageDate
© KEB Antriebstechnik, 1999
All Rights reserved
Chapter
Functional DescriptionPositioning Module
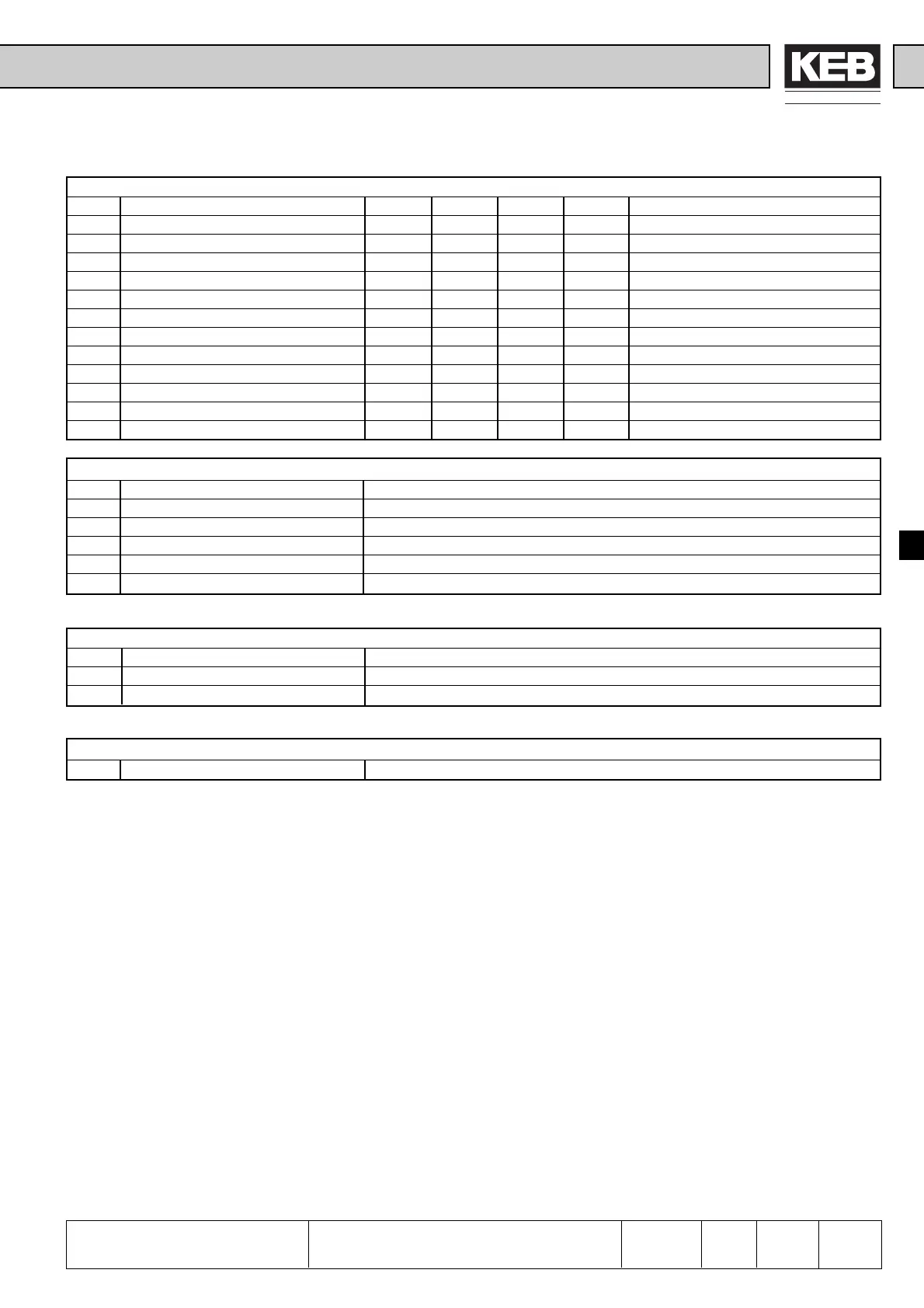
Position setting (Pd ) - Parameter
Set 0 Set 1 Set 2 Set 3
Pd. 0 Positioning 1 1 1 1 on
Pd. 1 Manual start 0 0 0 0 no manual starting
Pd. 2 Kp position 20 20 20 20 depending on the load
Pd. 3 Limit for position controller 500 500 500 500
Pd. 5 S curve time 0,5 0,5 0,5 0,5
Pd. 6 Acceleration time 0,6 0,6 0,6 0,6
Pd. 7 Maximum speed 2100 2100 2100 2100
Pd .8 Position setting sign 0 0 0 0
Pd. 9 Position setting high 8 128 2 16 setting see reference point
Pd. 10 Position setting low 500 6000 4000 3800
Pd .11 Positioning mode 0 0 0 0 absolute
Pd. 12 Target window size 16383 16383 16383 16383 target window 90°
Digital inputs (di) - Parameter
di. 3 Input function I1 1 : Set selection
di. 4 Input function I2 1 : Set selection
di. 5 Input function I3 19 : Start positioning
di. 6 Input function I4 22 : Positioning deactivated
di. 11 Input function I5 16 : Limit switch right
di. 12 Input function I6 21 : Limit switch left + reference switch
Digital outputs (do) - Parameter
do. 1 Switching condition 1 30 : Target window reached
do. 28 Output filter 1 time 20 ms
do. 30 Output filter linkage 1 : D1
Free-to-program parameter (Fr) - Parameter
Fr. 2 Source parameter set 2 : Terminal strip binary-coded

 Loading...
Loading...
