23
UserManualforELD2Servo
Youcansetuptheratiooftheloadinertiaagainsttherotor(ofthemotor)inertia.
Pr0.04=(loadinertia/rotateinertia)×100%
Notice:
If the inertia ratio is correctly set, the setup unit of Pr1.01 and Pr1.06 becomes (Hz). When the inertia
ratio of Pr0.04 is larger than the actual value, the setup unit of the velocity loop gain becomes larger,
and when the inertia ratio of Pr0.04 is smaller than the actual value, the setup unit of the velocity
loop gain becomes smaller.
Pr0.06*
CommandPulseRotationalDirection
Setup
Range unit default
Related
control mode
0 -1 - 0 P
Set command pulse input rotate direction, command pulse input type, changing this value will
reverse the direction of rotation
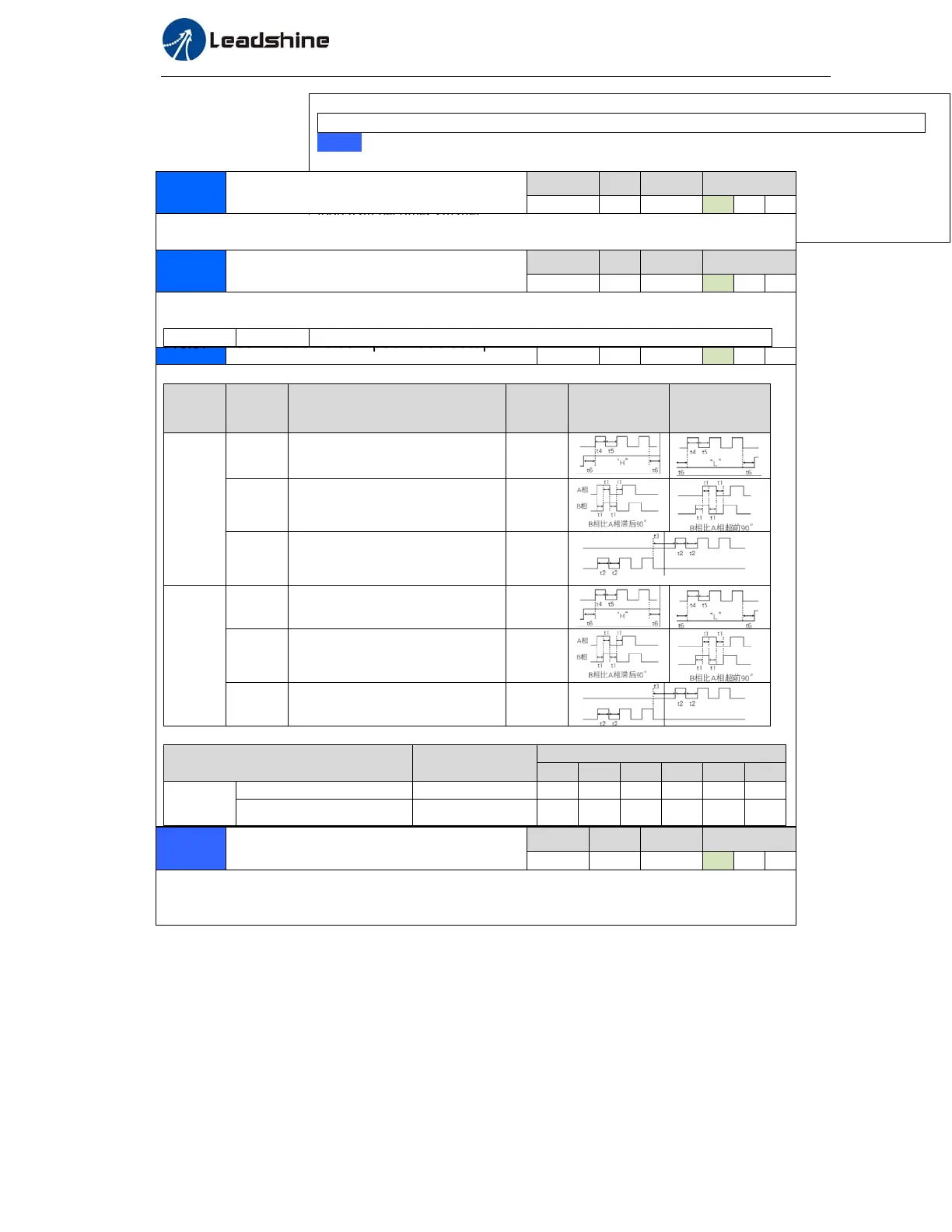
Pr0.07*
CommandPulseInputModeSetup
Range unit default
Related
control mode
0 -3 - 3 P
Pr0.06 Pr0.07 CommandPulseFormat Signal
Positive
Direction
Command
Negative
Direction
Command
0
0 Pulse + sign
Pulse
sign
1 or 3
90 phase difference
2-phase pulse(A phase +B
phase)
Pulse
sign
2
Positive direction pulse +
negative direction pulse
Pulse
sign
1
0 Pulse + sign
Pulse
sign
1 or 3
90 phase difference
2-phase pulse(A phase +B
phase)
Pulse
sign
2
Positive direction pulse +
negative direction pulse
Pulse
sign
Command pulse input signal allow largest frequency and smallest time width
PULS/SIGN Signal Input I/F
Permissible Max.
Input Frequency
Smallest Time Width
t1 t2 t3 t4 t5 t6
Pulse
series
interface
Long distance interface 500kpps
2 1 1 1 1 1
Open-collector output 200kpps
5 2.5 2.5 2.5 2.5 2.5
Pr0.08
Commandpulsecountsperonemotor
revolution
Range unit default
Related
control mode
0-32767
pulse 0
P
Set the command pulse that causes single turn of the motor shaft.
When this setting is 0 ,Pr009 1
st
numerator of electronic gear and Pr0.10 Denominator of electronic
Gear become valid.
Pr0.09 1stnumeratorofelectronicgear
Range unit default
Related
control mode
1-32767 - 1 P
Set the numerator of division/multiplication operation made according to the command pulse input.
Pr0.10
denominatorofelectronicgear
Range unit default
Related
control mode
1-32767 - 1 P
Set the denominator of division/multiplication operation made according to the command pulse
input.
Pr0.09 Pr0.10 Command division/multiplication operation