59
UserManualforELD2Servo
加速时间
减速时间
定时数据
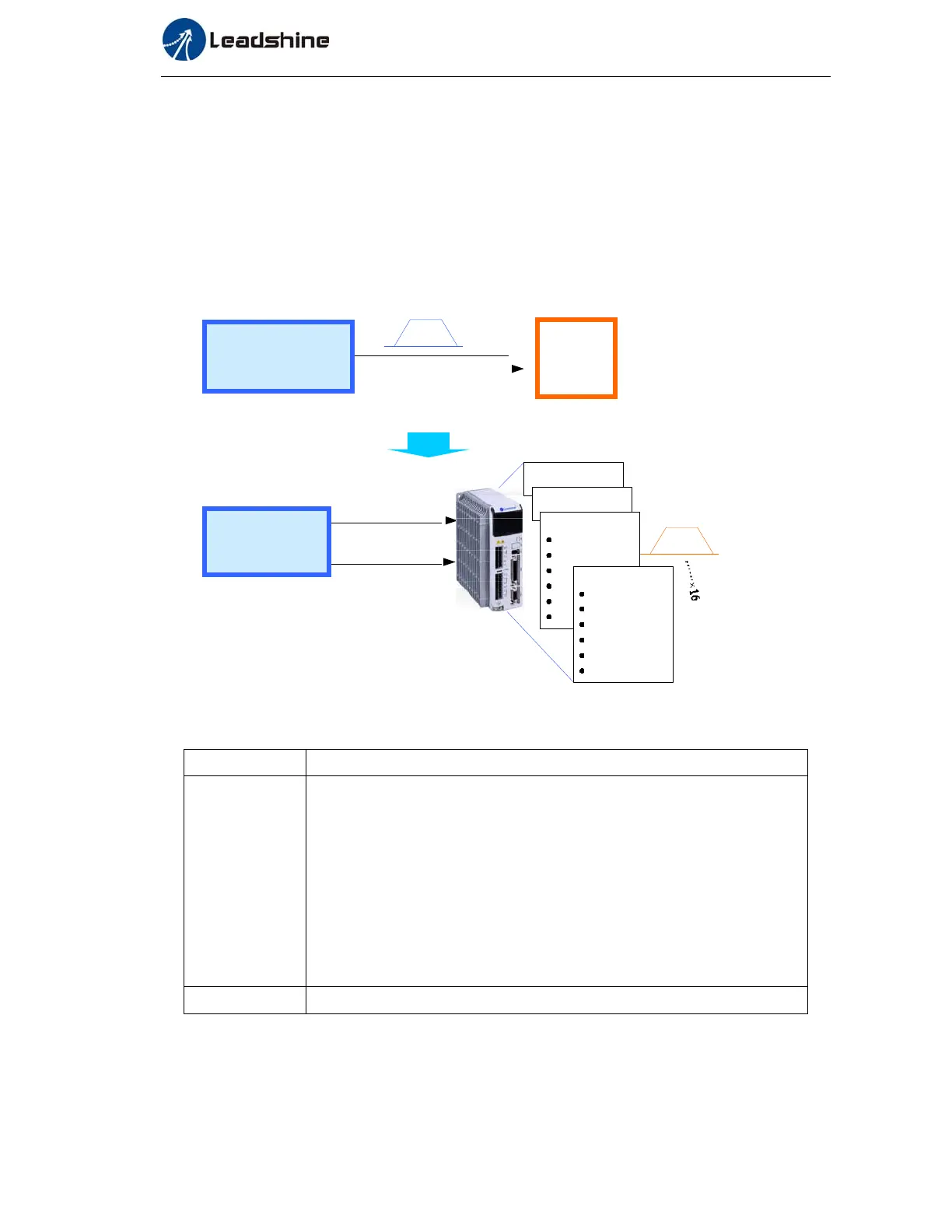
Chapter 7 PR function
7.1 Overview
PR is uniaxial motion control function which is controlled by procedure software. Mainly
uniaxial motion command control, save the motion control function of the controller.
General positioning motion control system
Homing, JOG
Singlechip/
simple PLC
Address IO(AD0-3
Start IO(CTRG)
485/232communicatio
PR positioning motion control system
Position limit, E-stop,
Positioning path NO.0
Positioning mode
Position data
Positioning path
NO.1
5
Positioning mode
Position data
Speed data
Acceleration
time
Deceleration
time
Timing data
PTP
7.1.1 Main function
Main function as below:
PR function
Specification
Homing
Through homing, the drive can find the home signal,
So the coordinate system zero of mechanical motion is determined
Limit signal homing, home signal homing, and manual homing selectable,
Homing direction settable
Home shift position settable.
Can be positioned to the specified location after homing
Homing acceleration and deceleration settable
Remark:Cannot input external pulse during homing!!
JOG
Realize positive/negative point move by I/O, for debugging
Servo
Driver
Motion
controller / PLC
positioning
PTP
Pulse+Direction