62
UserManualforELD2Servo
7.2 Parameter
PR parameters contain 8th and 9th parameters, 8th parameters is e-stop and control parameters, 9th
parameters is store path table.
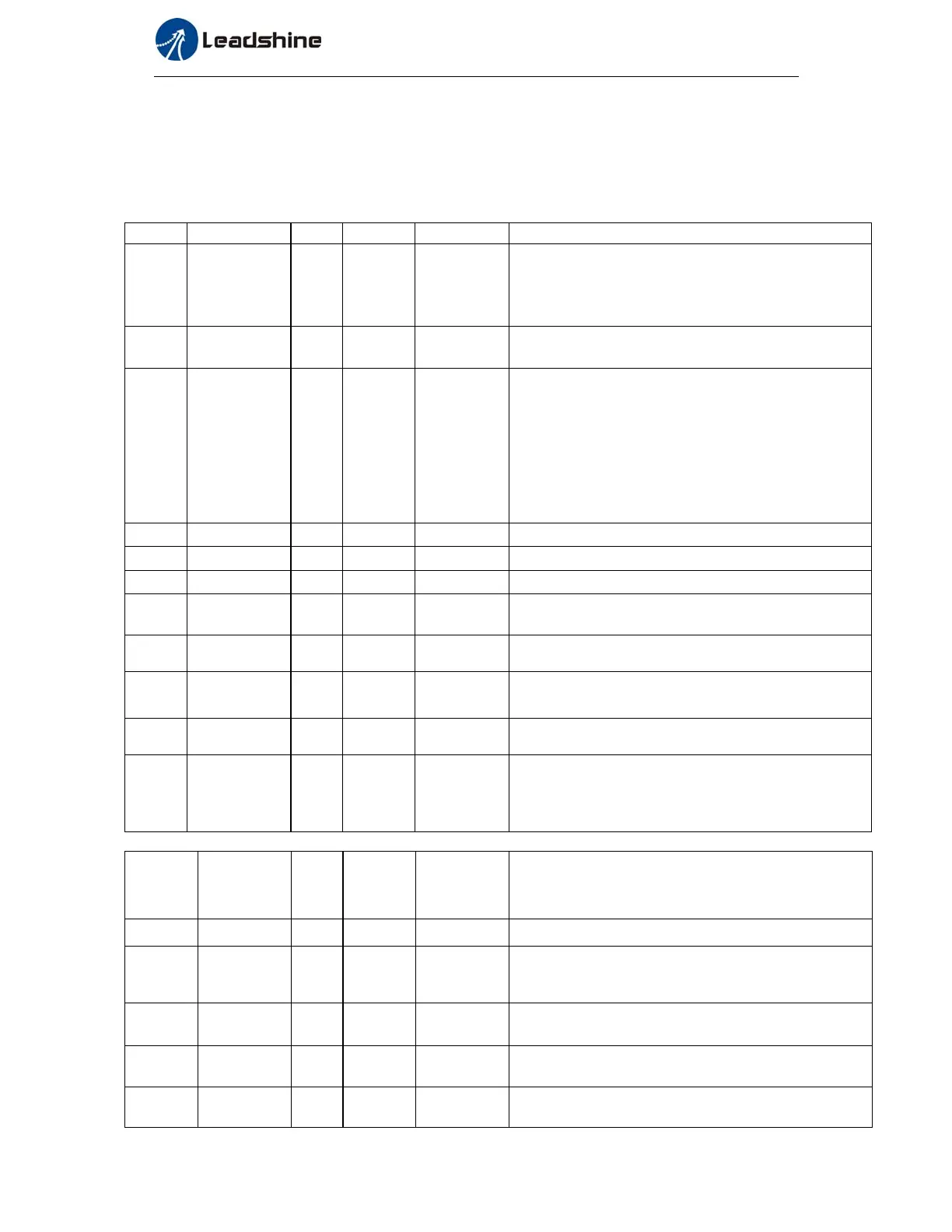
7.2.1 8th sort parameters specification
No. Name Data
Range
Default Value
Definition
P8.0
PR control
setting
hex
0-3
0
PR 's global control function
Bit0:CTRG rising edge trigger / double edge trigger, 0/1
Bit1:Software limit effectively,0 invalid /1 valid
Bit2:Homing after power on ,0 invalid /1 valid
P8.1
PR path section
number
16 16 0 Fixed 16 section
P8.2
Control
register input
hex
0
0
Write 0x1P,P section locate 16-31
Write 0x20,homing
Write 0x21,manual zero point setting
Write 0x40,e-stop,P i n s i g n i f i c a n c e 6 4
Read 0x00P,indicate positioning finished, can receive new data
Read 0x10P, In operation
Read 0x20P,In positioning
P8.3 Reserved 16 0 0
P8.4 Reserved 16 0 0
P8.5 Reserved 16 0 0
P8.6
Positive software
limit H
32 (+-2^31) 0x7FFF
Positive software limit +high 16 bit, during homing,software limi
invalid.
P8.7
Positive software
limit L
0XFFFF Positive software limit +low 16 bit,
P8.8
Negative
software limit H
32 (+-2^31) 0x8000
Negative software limit -high 16 bit, The precision of software
limit is 0.1 round
P8.9
Negative
software limit L
0 Negative software limit - low 16 bit
P8.10
Homing mode
hex
0
Homing mode,
Bit0:homing reverse, 0 reverse/1 forward
Bit1:Whether back to zero after homing, 0 No /1 Yes
Bit2-7:Homing mode
P8.11
Zero position H
32
(+-2^31)
0
Zero signal on coordinate axis.
Such as take positive limit as homing signal but take negative limi
as absolute position 0, then zero position is the distance between
positive/negative limit.
P8.12 Zero position L
0
P8.13
Homing
stop
position H
32
(+-2^31)
0
After homing,motor stop after move to appointed position. If
homing mode bit1 enable. Then moving to the absolute position
after homing.
P8.14
Homing stop
position L
0
P8.15 Homing high
speed
16 1-6000 200 Homing high speed
P8.16 Homing low
speed
16 1-6000 50 Homing creeping speed