24
UserManualforELD2Servo
4.2.2
【
Class 1
】
Gain Adjust
1-32767 1-32767
Pr0.11*
Output pulse counts per one motor
revolution
Range unit default
Related
control mode
1-2500 P/r 2500 P S T
Set the numerator of division/multiplication operation made according to the command pulse input.
Pr5.03*
Denominatorofpulseoutputdivision
Range unit default
Related
control mode
1-2500 - 2500 P S T
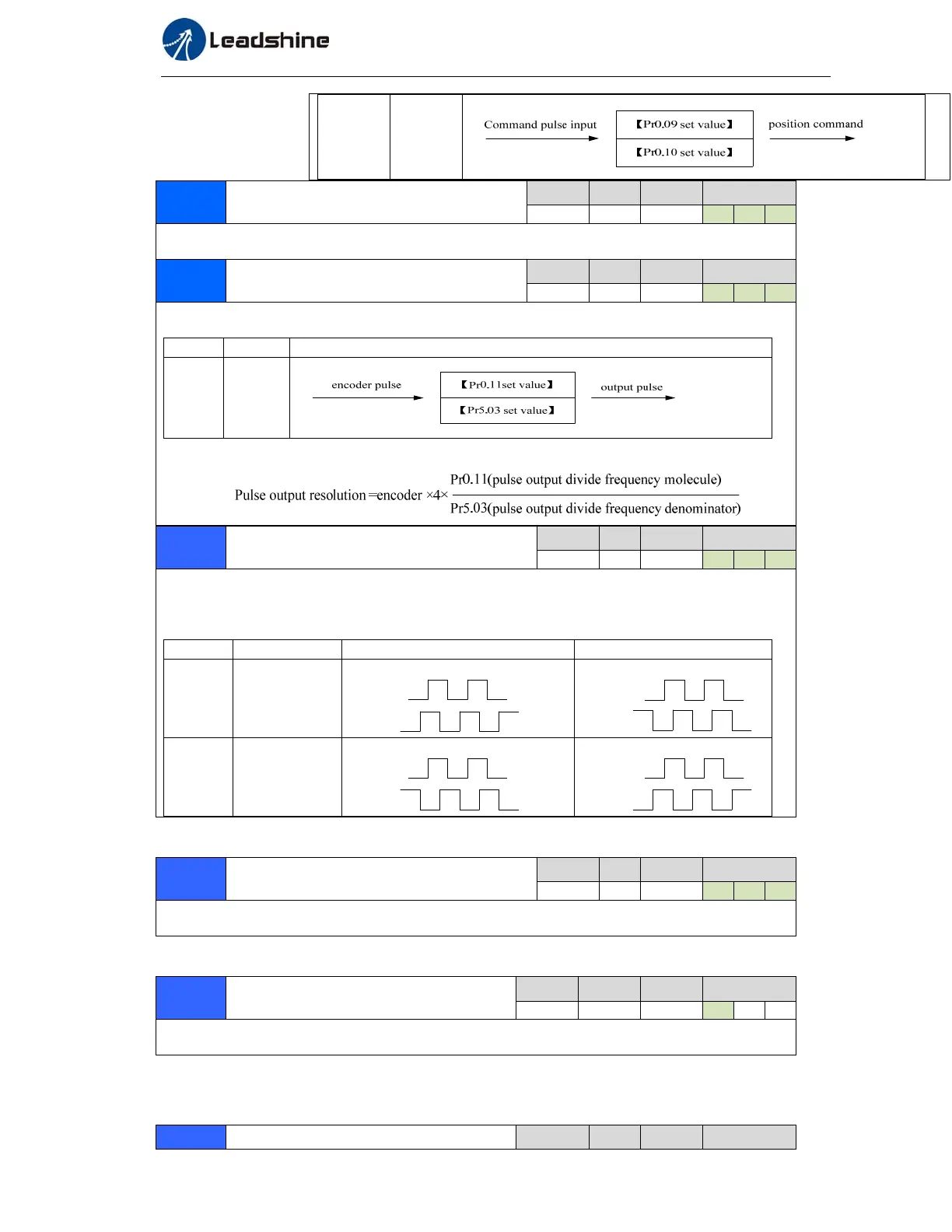
CombinationofPr0.11OutputpulsecountsperonemotorrevolutionandPr5.03Denominatorof
pulseoutputdivision
Pr0.11 Pr5.03 Pulseoutputprocess
1‐2500 1‐2500
Pulseoutputresolutionafterdividingdoublefrequency4times
Pr0.12*
Reversalofpulseoutputlogic
Range unit default
Related
control mode
0 -1 - 0 P S T
You can set up the B phase logic and the output source of the pulse output. With this parameter, you
can reverse the phase relation between the A-phase pulse and B-phase pulse by reversing the B-phase
logic.
< reversal of pulse output logic >
Pr0.12 B‐phaseLogic CCWDirectionRotation CWDirectionRotation
0 Non‐Reversal Aphase
Bphase
Aphase
Bphase
1 Reversal Aphase
Bphase
Aphase
Bphase
Pr0.13
1stTorqueLimit
Range unit default
Related
control mode
0 -500 % 300 P S T
You can set up the limit value of the motor output torque, as motor rate current %, the value can’t
exceed the maximum of output current.
Pr0.14
PositionDeviationExcessSetup
Range unit default
Related
control mode
0 -500 0.1 rev 200 P
Set excess range of positional deviation by the command unit(default).Setting the value too small
will cause Er
18.0 (
osition deviation excess detection)
Pr1.00
1stgainofpositionloop
Range unit default
Related
control mode