40
UserManualforELD2Servo
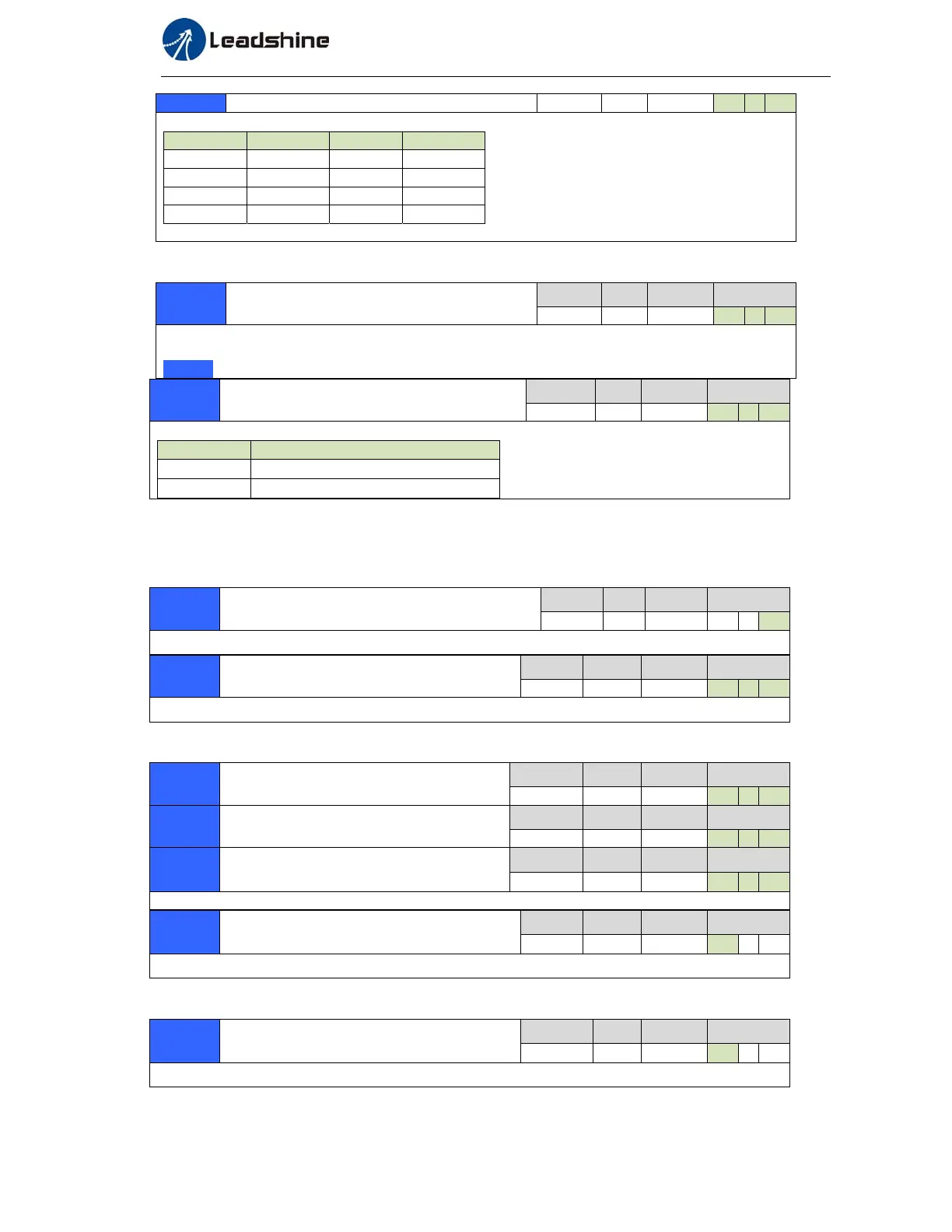
4.2.7
【
Class 6
】
Special Setup
communication 0-6
-
2 P S T
YoucansetupthecommunicationspeedofRS485.
Set value Baud rate Set value Baud rate
0 2400bps 4 38400bps
1 4800bps 5 57600bps
2 9600bps 6 115200bps
3 19200bps
Baud rate error is 2400-38400bps±5% ,57600-115200bps±2%
Pr5.31*
Axisaddress
Range unit default
Related
control mode
0-127
-
1 P S T
During communication with the host (e.g. PC) to control multiple shafts, the shaft being accessed by
the host should be identified.
Notice: when using RS232/RS485, the maximum valid value is 31.
Pr5.35*
Frontpanellocksetup
Range unit default
Related
control mode
0-1
-
0 P S T
Locktheoperationonthefrontpanel.
Setup value content
0
No limit on the front panel operation
1
Lock the operation on the front panel
Pr6.03
JOGtrialruncommandtorque
Range unit default
Related
control mode
0 -100
%
0 T
You can set up the command speed used for JOG trial run (torque control).
Pr6.04
JOGtrialruncommandspeed
Range unit default
Related
control mode
0-500
r/min
300 P S T
You can set up the command speed used for JOG trial run (velocity control).
Pr6.07
JOGtrialruncommandspeed
Range unit default
Related
control mode
-100-100
%
0 P S T
Pr6.08
JOGtrialruncommandspeed
Range unit default
Related
control mode
-100-100
%
0 P S T
Pr6.09
JOGtrialruncommandspeed
Range unit default
Related
control mode
‐100‐100
%
0 P S T
This three parameters may apply feed forward torque superposition directly to torque command.
Pr6.20
Trialrundistance
Range unit default
Related
control mode
0-200
0.1rev
10 P
The distance of running each time in JOG run(position control)
Pr6.21
Trialrunwaitingtime
Range unit default
Related
control mode
0-30000
Ms
1000 P
The waiting time after running each time in JOG run(position control)