55
UserManualforELD2Servo
2 PA_312 Acceleration time setup / User-specified millisecond
3 PA_313 Deceleration time setup / User-specified millisecond
4 PA_314
Sigmoid acceleration/deceleration time
setup
/
User-specified millisecond
5 PA_315 Zero-clamp function selection / 0 /
6 PA_319 Torque command direction input gain / User-specified 0.1V/100%
7 PA_320 Torque setup input reversal / User-specified /
8 PA_321 Speed limit value 1 / User-specified R/min
9 PA_400 SI1 input selection Srv_on hex:0383 /
10 PA_422 Analog input offset setup / User-specified 0.359mv
11 PA_423 Analog input filter / User-specified 0.01ms
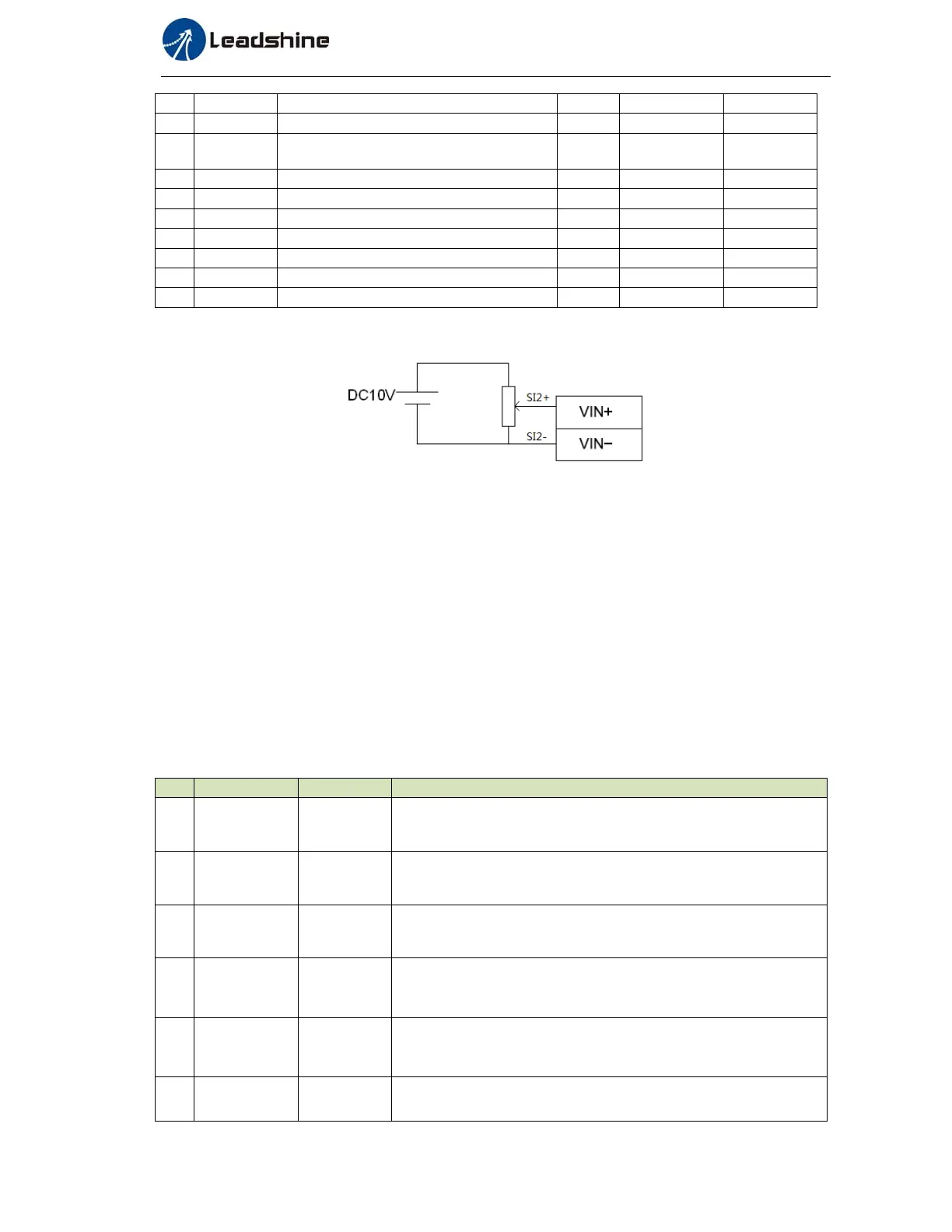
◆Wiring Diagram
◆Operation Steps
1. connect terminal CN1.
2. Enter the power (DC12V to 24V) to control signal (the COM + and COM-).
3. Enter the power to the driver.
4. Confirm the value of the parameters, and write to the EEPROM and turn off/on the power (of the driver)
5. Apply DC voltage between torque command input , VIN+ and VIN-, and gradually increase from 0V to
confirm the motor runs.
6.3 Automatic Control Mode Run
6.3.1 Operation Mode Selection
ELD2seriesLow ‐voltageACservodrivessupporttheposition,speed,torquethreebasicmodesof
operation,andcanswitchfreelybetweenthethreebasicmodesofopera tionbyswitchormodify
parameters.
Table7.7ParametersetupofOperationModeSelection
No Mode Parameter Specification
1 Position mode PA_001=20
The position control is performed based on the positional command
(pulse train) from the host controller or the command set in the
servo driver.
2 Velocity mode PA_001=21
The velocity control is performed according to the analog speed
command from the host controller or the speed command set in the
servo driver.
3 Torque mode PA_001=22
The torque control is performed according to the torque command
specified in the form of analog voltage or the command set in the
servo driver.
4
1st mode:
position mode
2nd mode:
s
eed mode
PA_001=23
The control mode is switched through external input.
5
1st mode:
position mode
2nd Mode:
tor
ue mode
PA_001=24
The control mode is switched through external input.
6
1st mode:
speed mode
2nd Mode:
PA_001=25
The control mode is switched through external input.