19
UserManualforELD2Servo
Chapter 4 Parameter
4.1 Parameter List
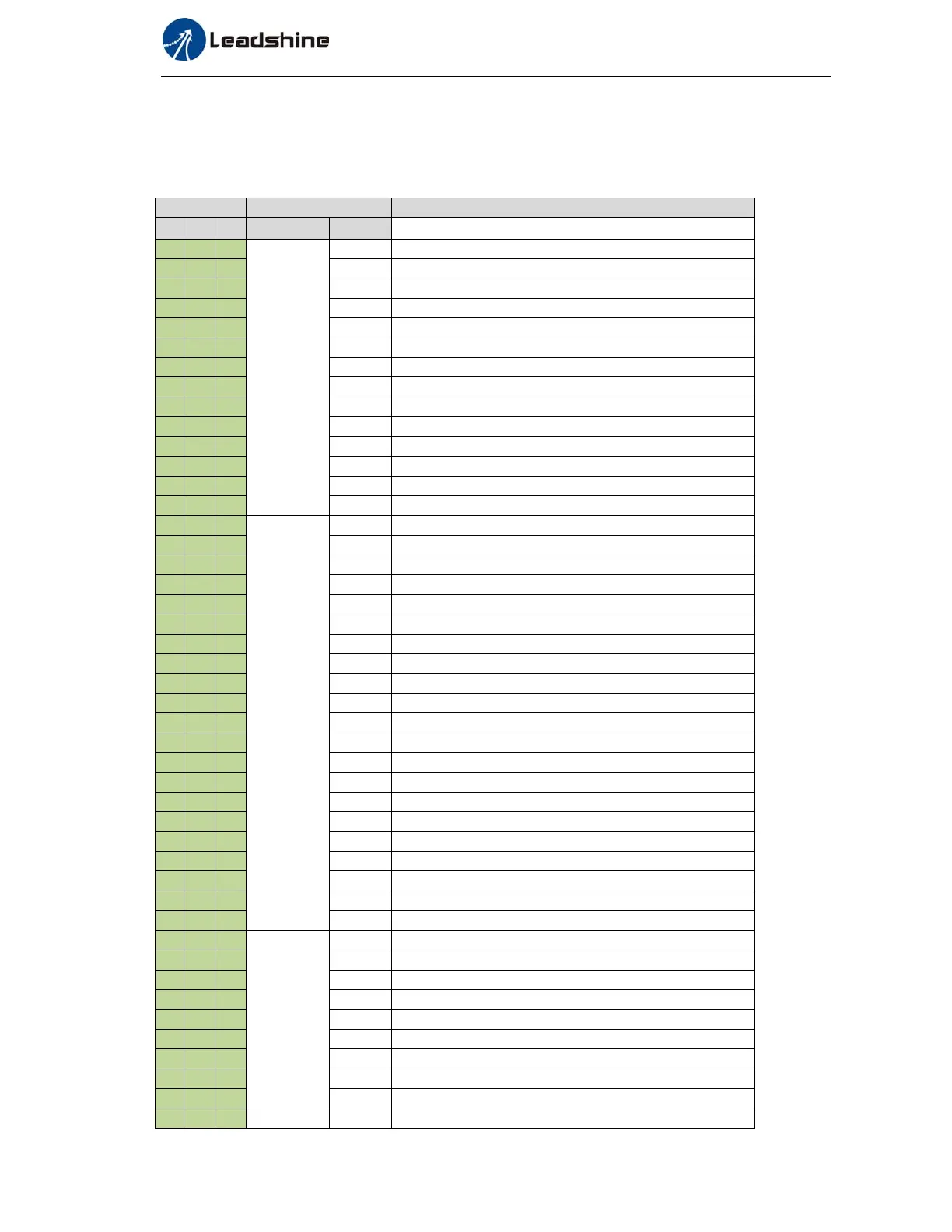
Mode ParameterNumber Name
P S T Classify
Number
P S T
【Class0】
Basic
setting
00 Model following control
01 control mode setup
P S T
02 real-time auto-gain tuning
P S T
03 selection of machine stiffness at real-time auto-gain tuning
P S T
04 Inertia ratio
P
06 command pulse rotational direction setup
P
07 command pulse input mode setup
08 Command pulse counts per revolution
P
09 1st numerator of electronic gear
P
10 denominator of electronic gear
P S T
11 output pulse counts per one motor revolution
P S T
12 reversal of pulse output logic
P S T
13 1st torque limit
P
14 position deviation excess setup
P
【Class1】
GainAdjust
00 1st gain of position loop
P S T
01 1st gain of velocity loop
P S T
02 1st time constant of velocity loop integration
P S T
03 1st filter of velocity detection
P S T
04 1st time constant of torque filter
P
05 2nd gain of position loop
P S T
06 2nd gain of velocity loop
P S T
07 2nd time constant of velocity loop integration
P S T
08 2nd filter of velocity detection
P S T
09 2nd time constant of torque filter
P
10 Velocity feed forward gain
P
11 Velocity feed forward filter
P S
12 Torque feed forward gain
P S
13 Torque feed forward filter
P S T
14 2nd gain setup
P
15 Control switching mode
P
17 Control switching level
P
18 Control switch hysteresis
P
19 Gain switching time
P
35 Positional command filter setup
P S T
36 Encoder feedback pulse digital filter setup
P S
【Class2】
Vibration
Restrain
Function
00 adaptive filter mode setup
P S T
01 1st notch frequency
P S T
02 1st notch width selection
P S T
03 1st notch depth selection
P S T
04 2nd notch frequency
P S T
05 2nd notch width selection
P S T
06 2nd notch depth selection
P
22 Positional command smooth filter
P
23 Positional command FIR filter
S
【Class3】
00 Velocity setup internal/external switching