60
UserManualforELD2Servo
Positive point move
Negative point move
JOG s
eed and acceleration selectable
Position limit Protect device by limiting move range
Positive and negative signal input by IO
Software position limit setting
Position limit deceleration settable
Remark:Software position limit effective after homing accomplish.
E-stop
In
ut E-sto
si
nal throu
h I/O,sto
ositionin
o
eration.
Positioning
Select location path number by positioning address IO(AD0-3),
Then start the location path operation by activate I/O(CTRG)
Contains the positioning mode, speed mode and homing mode.
IO rising edge double edge trigger start.
Support continuous positioning
Maximum 16 segment
Position, speed, acceleration settable
Pause/timing time settable
Remark: Double edge trigger only effective for CTRG !
485 control Use 485 communication to manipulate above PR working
Remark:(1)For PR mode, position command adopt unit: 10000P/r.
(2)PR only effective under PR position control mode, P0.01=0.
7.1.2 Installation wiring
IO terminal wiring and parameter configuration:Newly added IO of PR on the base of standard IO
Relevant parameters:
Parameter Name Specification
P400-P407
SI input
selection
Specific of the 8 input terminals' function distribution,refer to functional
allocation table.
P410-P415
SO output
selection
Specific of the 6 output terminals' function distribution,refer to functional
allocation table.
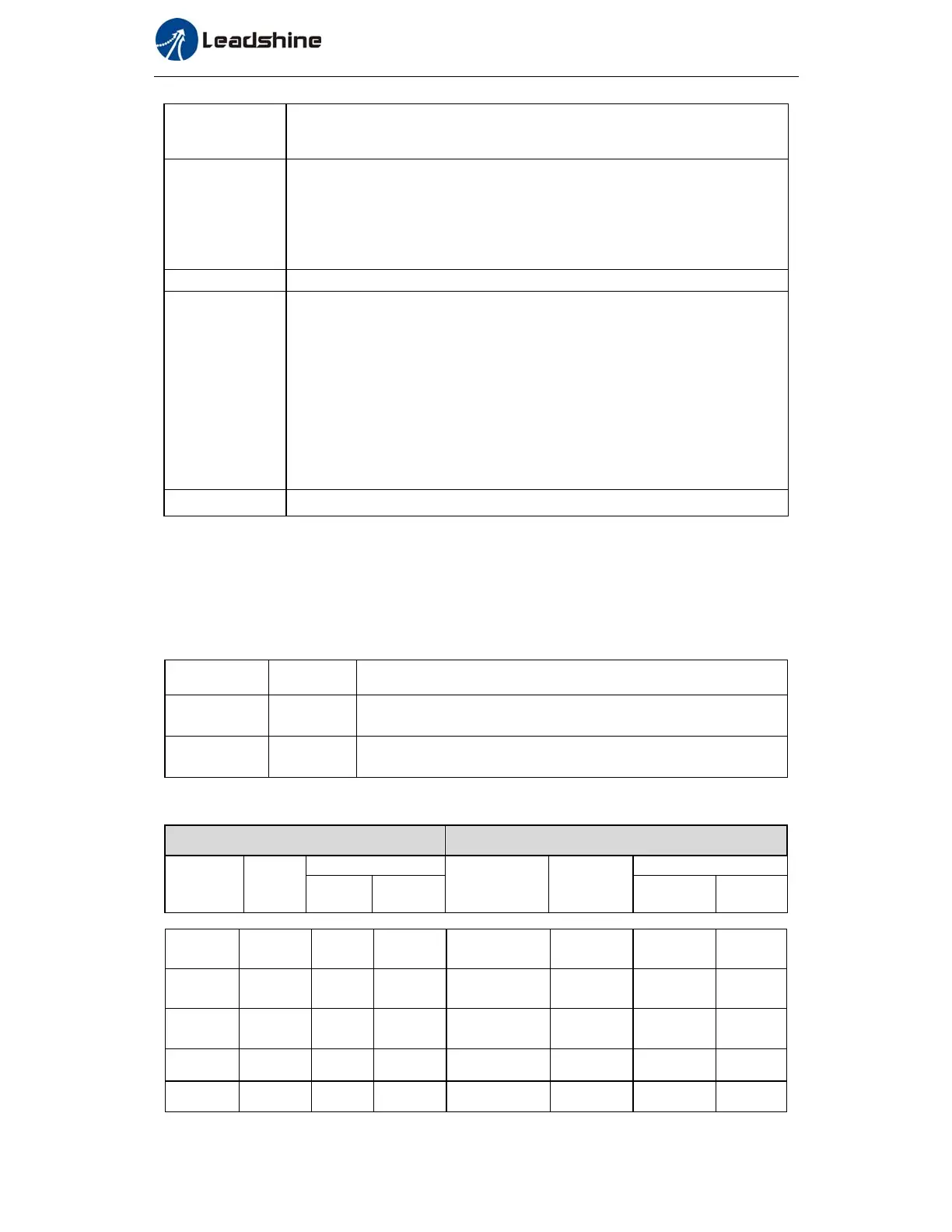
IO terminal functional allocation table:
Input Output
Signal
name
Symbol
set value
signal name Symbol
set value
Normally
open
Normally
close
Normally
open
Normally
close
Trigger
command
CTRG 20h A0h
Accomplish
commands
CMD_OK 20h A0h
Homing
signal
HOME 21h A1h
Accomplish path
MC_OK 21h A1h
Forced to
stop
STP 22h A2h
Accomplish
homing
HOME_OK 22h A2h
Positive
JOG
JOG+ 23h A3h
Torque limit
TQL 06h 86h
Negative
JOG
JOG- 24h A4h