26
UserManualforELD2Servo
0 -2500 0.01ms 126 P S T
Position loop, velocity loop, velocity detection filter, torque command filter have their 2 pairs of gain
or time constant(1st
and 2nd).
Pr1.10
Velocityfeedforwardgain
Range unit default
Related
control mode
0 -1000 0.1% 300 P
Multiply the velocity control command calculated according to the internal positional command by
the ratio of this parameter and add the result to the speed command resulting from the positional
control process.
Pr1.11
Velocityfeedforwardfilter
Range unit default
Related
control mode
0 -6400 0.01ms 50 P
Set the time constant of 1st delay filter which affects the input of speed feed forward.
(usage example of velocity feed forward)
The velocity feed forward will become effective as the velocity feed forward gain is gradually
increased with the speed feed forward filter set at approx.50 (0.5ms). The positional deviation during
operation at a constant speed is reduced as shown in the equation below in proportion to the value of
velocity feed forward gain.
Position deviation [ unit of command]=command speed [ unit of command /s]/position loop
gain[1/s]×(100-speed feed forward gain[%]/100
Pr1.12
Torquefeedforwardgain
Range unit default
Related
control mode
0 -1000 0.1% 0 P S
Multiply the torque control command calculated according to the velocity control command by
the ratio of this parameter and add the result to the torque command resulting from the velocity
control process.
To use torque feed forward, correctly set ratio of inertia. Set the inertia ratio that can be calculated
from the machine specification to Pr0.04 inertia ratio.
Positional deviation at a constant acceleration/deceleration can be minimized close to 0 by
increasing the torque forward gain .this means that positional deviation can be maintained at near
0 over entire operation range while driving in trapezoidal speed pattern under ideal condition
where disturbance torque is not active.
Pr1.13
Torquefeedforwardfilter
Range unit default
Related
control mode
0‐6400 0.01ms 0 P S
Set up the time constant of 1st delay filter which affects the input of torque feed forward.
zero positional deviation is impossible in actual situation because of disturbance torque. as with
the velocity feed forward, large torque feed forward filter time constant decreases the operating noise
ut increases positional deviation at acceleration change point.
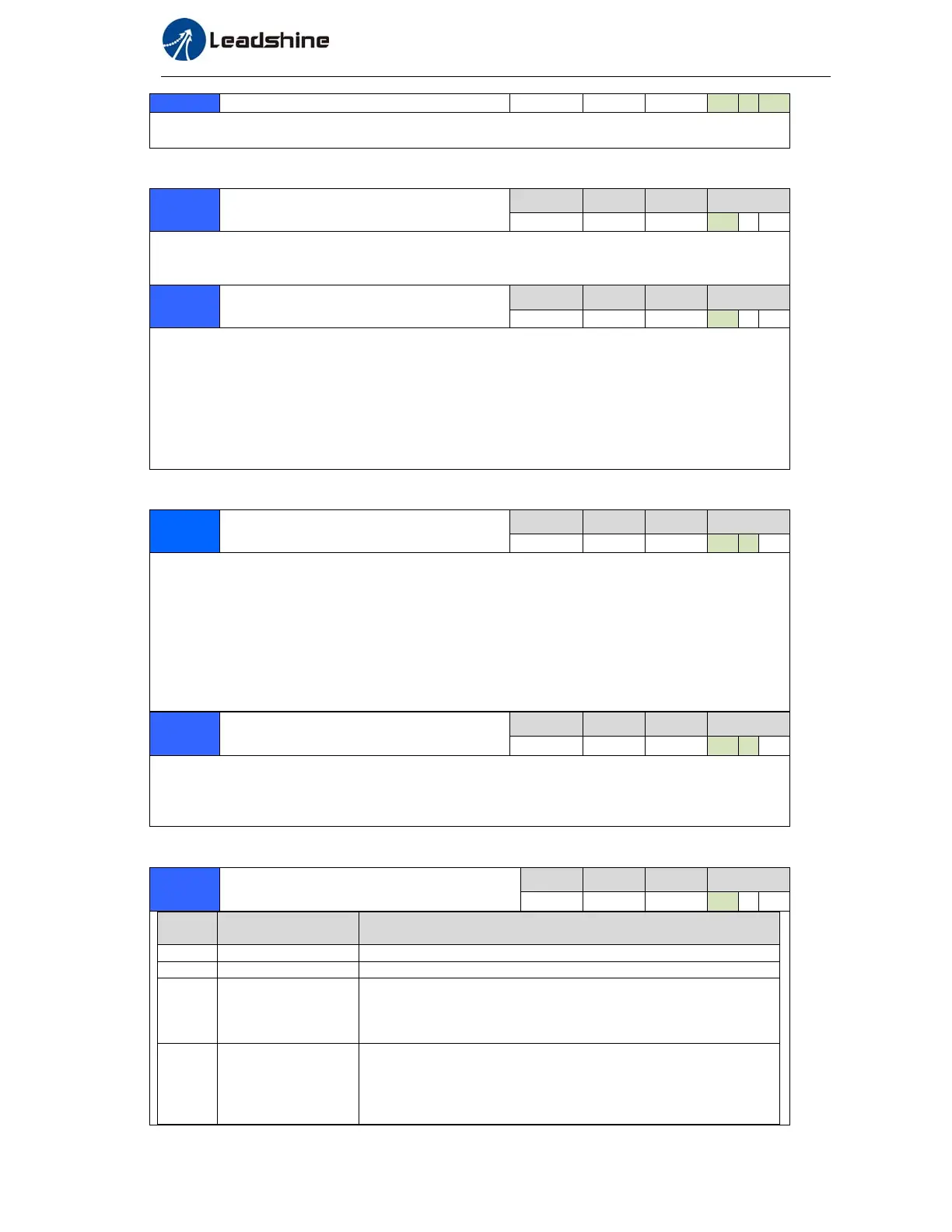
Pr1.15
Modeofpositioncontrolswitching
Range unit default
Related
control mode
0‐10‐ 0 P
Setting
value
Switchingcondition Gainswitchingcondition
0 Fixed to 1st
ain Fixed to the 1st
ain
Pr1.00-Pr1.04
1 Fixed to 2nd
ain Fixed to the 2nd
ain
Pr1.05-Pr1.09
2 with gain switching
input
1st gain when the gain switching input is open.
2nd gain when the gain switching input is connected to com- .
If no input signal is allocated to the gain switching input, the
1st
ain is fixed.
3 Torque command is
large
Shift to the 2nd gain when the absolute value of the torque
command exceeded (level + hysteresis)[%]previously with the
1st gain.
Return to the 1st gain when the absolute value of the torque
command was ke
t below
level + h
steresis
[%]
reviousl