66
UserManualforELD2Servo
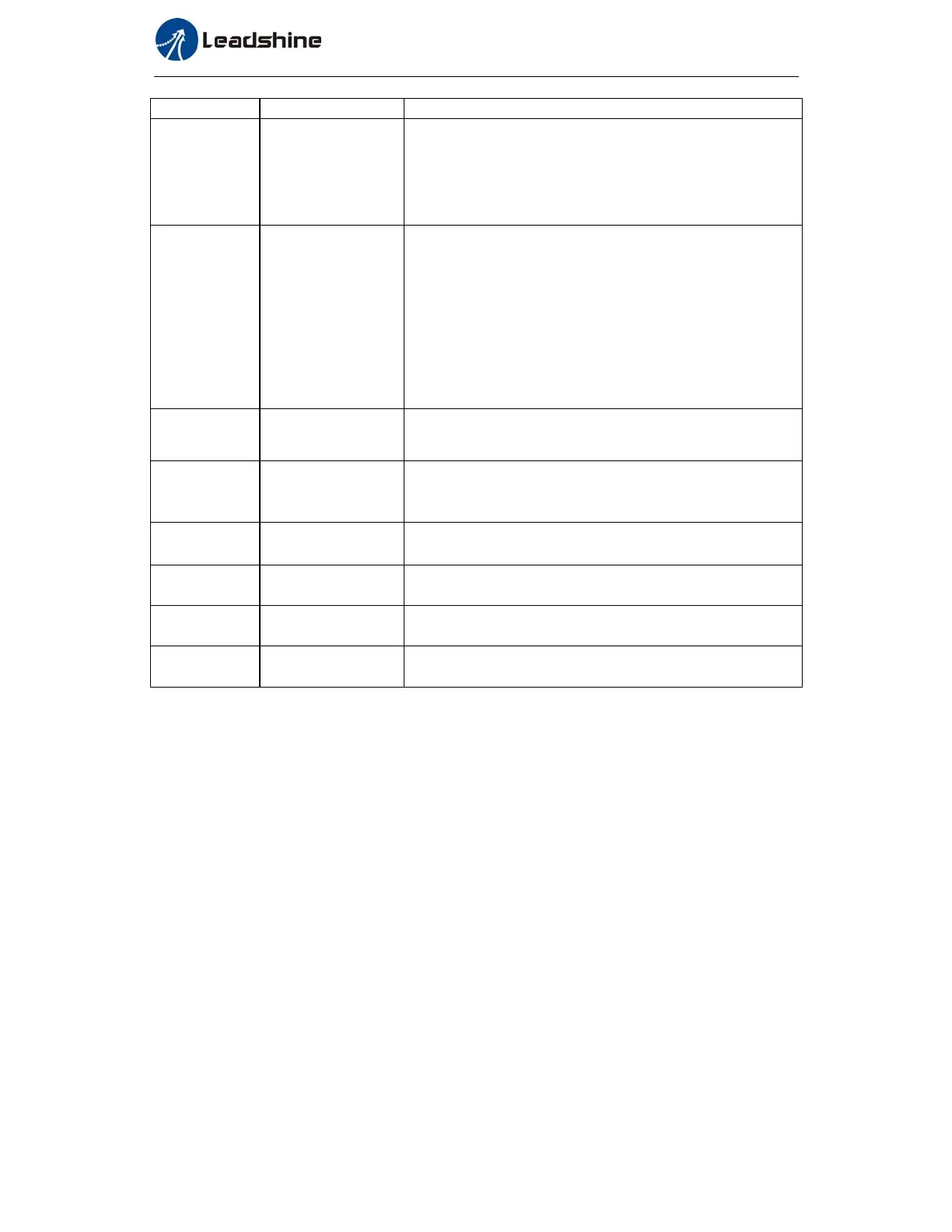
Parameter Name S
ecification
P8.00
PR control setting
PR 's global control function
Bit0:CTRG Rising edge trigger / Double edge trigger
,0/1
Bit1: software limit is valid,0 invalid/1 valid
Bit2:homing after power on,0 invalid/1 valid
P810
Homing mode
Bit0:Homing direction,0 reverse/1 forward Bit1:
whether move to specific position after homing, 0 No/1 Yes
Bit2-7:Homing mode
=0,Position limit homing
=1,Zero point homing
=
2,Z phase homing (Need hardware support, not available
at present)
=8 Manual homing,
The other is prohibited to use!
P811-P812
Zero point position
Zero point position on the coordinate axes
P811 for high 16bit,P812 for low 16bit.
P813-P814
Homing jump position
Motor move to the specified location and stop after homing. If
homing mode bit1 enable, then move to the absolute position after
homing.
P813 for hi
h 16bi
,P814 for low 16bit.
P815
Homing high speed
First speed of homing, unit: rpm.
P816
Homing low speed
Second speed of homing, unit: rpm.
P817
Homing acceleration
time
Homing acceleration, unit: ms/1000rpm
P818
Homing deceleration
time
Homing deceleration, unit: ms/1000rpm