71
UserManualforELD2Servo
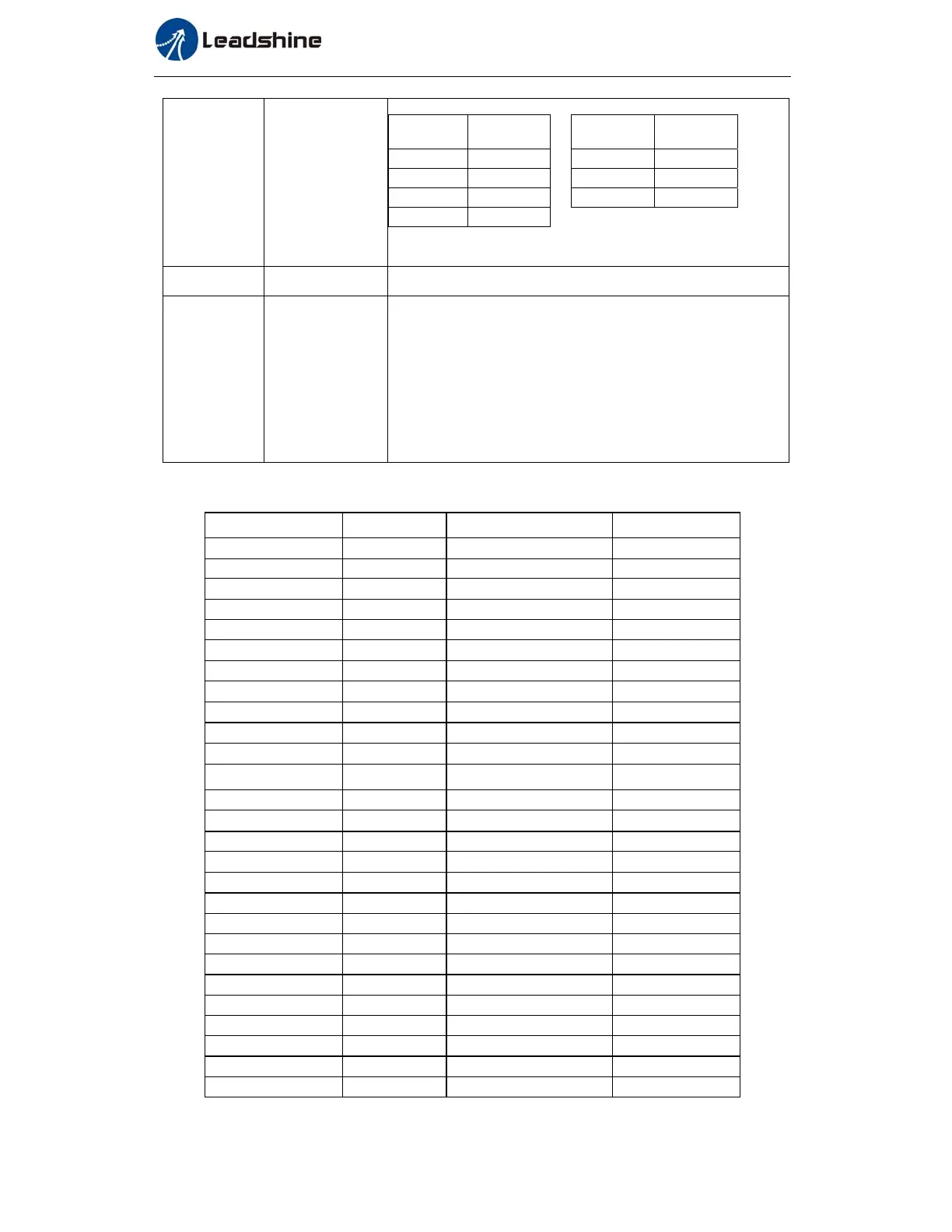
Pr5.30
Communication band
rate
Setting
value
Baud rate
Setting
value
Baud rate
0 2400bps 4 38400bps
1 4800bps 5 57600bps
2 9600bps 6 115200bps
3 19200bps
Baud rate deviation is 2400~38400bps±5%,
57600~115200bps±2%
Pr5.31
Device No.
Modbus sub-station address number(Slave ID) .
Pr8.02 PR trigger
(16bit,485 address..0x6002)
Write 0x01P,P section positioning Write
0x020,homing
Write 0x021,The current location manually set to zero.
Write 0x040,e-stop
Read 0x000p,means positioning completed, can receive new data .
Read 0x01P、0x020、0x040 Means still no responding to commands.
Read 0x10P , means path is running.
Read 0x200, means instructions completed and wait for positioning.
Communication address mapping of Pr-MODE
485 address Parameter Name Specification
0x6000 Pr8.00 PR control setup HEX
0 x 6 0 0 2 P r 8 . 0 2 P R c o n t r o l r e
iste
HEX
0x6006 Pr8.06 Positive software limit H
Pulse
0x6007 Pr8.07 Positive software limit L
Pulse
0x6008 Pr8.08 Negative software limit H
Pulse
0x6009 Pr8.09 Negative software limit L
Pulse
0x600a Pr8.10 Homing mode HEX
0x600b Pr8.11 Zero position H
Pulse
0x600c Pr8.12 Zero position L
Pulse
0x600d Pr8.13 Homing stop position H
Pulse
0x600e Pr8.14 Homing stop position L
Pulse
0x600f Pr8.15 High speed homing
r/min
0x6010 Pr8.16 Low speed homing
r/min
0x6011 Pr8.17 Homing acceleration
ms/Krpm
0x6012 Pr8.18 Homing deceleration
ms/Krpm
0x6016 Pr8.22 Position limit e-stop speed
r/min
0x6017 Pr8.23 STP e-stop speed
r/min
0x602a Pr8.42 Command position H Read only
0x602b Pr8.43 Command position L Read only
0x602c Pr8.44 Motor position H Read only
0x602d Pr8.45 Motor position L Read only
0x602e Pr8.46 Input IO status Read only
0x602f Pr8.47 Output IO status Read only
Pr9.00~Pr9.07 PR0 parameters
0x6200 Pr9.00 PR0 mode HEX
0x6201 Pr9.01 PR0 position H
Pulse
0x6202 Pr9.02 PR0 position L
Pulse