78
UserManualforELD2Servo
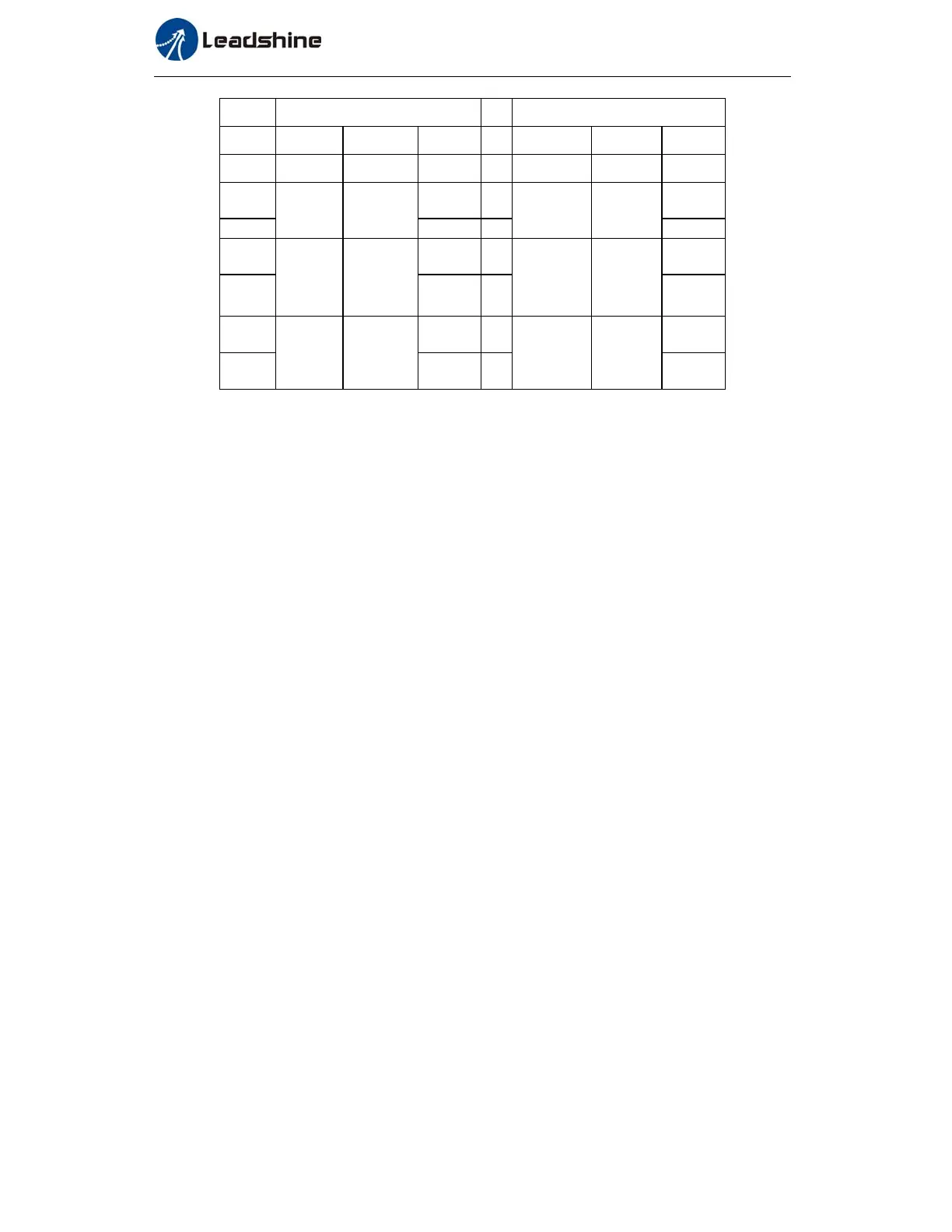
NO
Send
Recieve
1 ID
Slave ID
0~31
ID
Slave ID
0~31
2 FC
Function
0x06
FC
Function
0x06
3
ADDR
Address
Hi
ADDR
Address
Hi
4 Lo
Lo
5
DATA
Data
quantity
Word
Hi
DATA
Actually
written
data
Hi
6 Lo
Lo
7
CRC
check
code
Lo
CRC
check code
Lo
8 Hi
Hi
60 02 register address,mapped to Pr8.02
00 21 the data write into the register,Write 0x021,The current location manually set to zero.
Write 0x01P,P section positioning
Write 0x020,homing
Write 0x021,The current location manually set to zero.
Write 0x040,e-stop
F4 82 the CRC verification code, do not have to directly input, click the corresponding send area
verification button automatically generated
After the current position is set to zero manually, you can click absolute positioning again to send it
manually, indicating that the current position is set to zero manually
JOG is IO input, there is no communication control method, you can push users to write relative
positioning data in real time, and trigger inching motion immediately instead.
Speed:11 10 62 00 00 08 10 00 02 00 00 00 00 03 E8 00 64 00 64 00 00 00 10 17 4D
11 slave ID 17
10 function code,write multi data
62 00 first address mapped to Pr9.00
00 08 8 consecutive operating addresses from 62 00 to 62 07,mapped to Pr9.00~Pr9.07
10 Hexadecimal data of the number of data,8 register,each address data is divided into high
and low bits, 8*2=16
00 02 data written down to the first addresses of 6200 mapped to Pr9.00
Motion Model,Speed mode
00 00 00 00 data written down to the second and third addresses of 6201 mapped to Pr9.01;6202
mapped to Pr9.02.Hexadecimal data of position=0plus. All positions in PR mode are in
units of 10000P/r,therefore, 00 00 00 00 represents 0 turns of motor rotation in Speed
mode
03 E8 data written down to the fourth addresses of 6203 mapped to Pr9.03
Hexadecimal data of Speed=1000r/min
00 64 data written down to the five addresses of 6204 mapped to Pr9.04
Hexadecimal data of acceleration time=100ms
00 64 data written down to the six addresses of 6205 mapped to Pr9.05
Hexadecimal data of deceleration time=100ms
00 00 data written down to the seven addresses of 6206 mapped to Pr9.06
Hexadecimal data of the delay time=0ms
00 10 data written down to the eight addresses of 6207 mapped to Pr9.07 ,to trigger the action,
Immediately trigger method(1P,Immediately trigger path-P,The sample Pr9.00~9.07 is the