Free connection of analog signals
Free configuration analog process data output words
10
Function library
10.12
10.12.3
L
10.12-11
EDS82EV903-1.0-11/2002
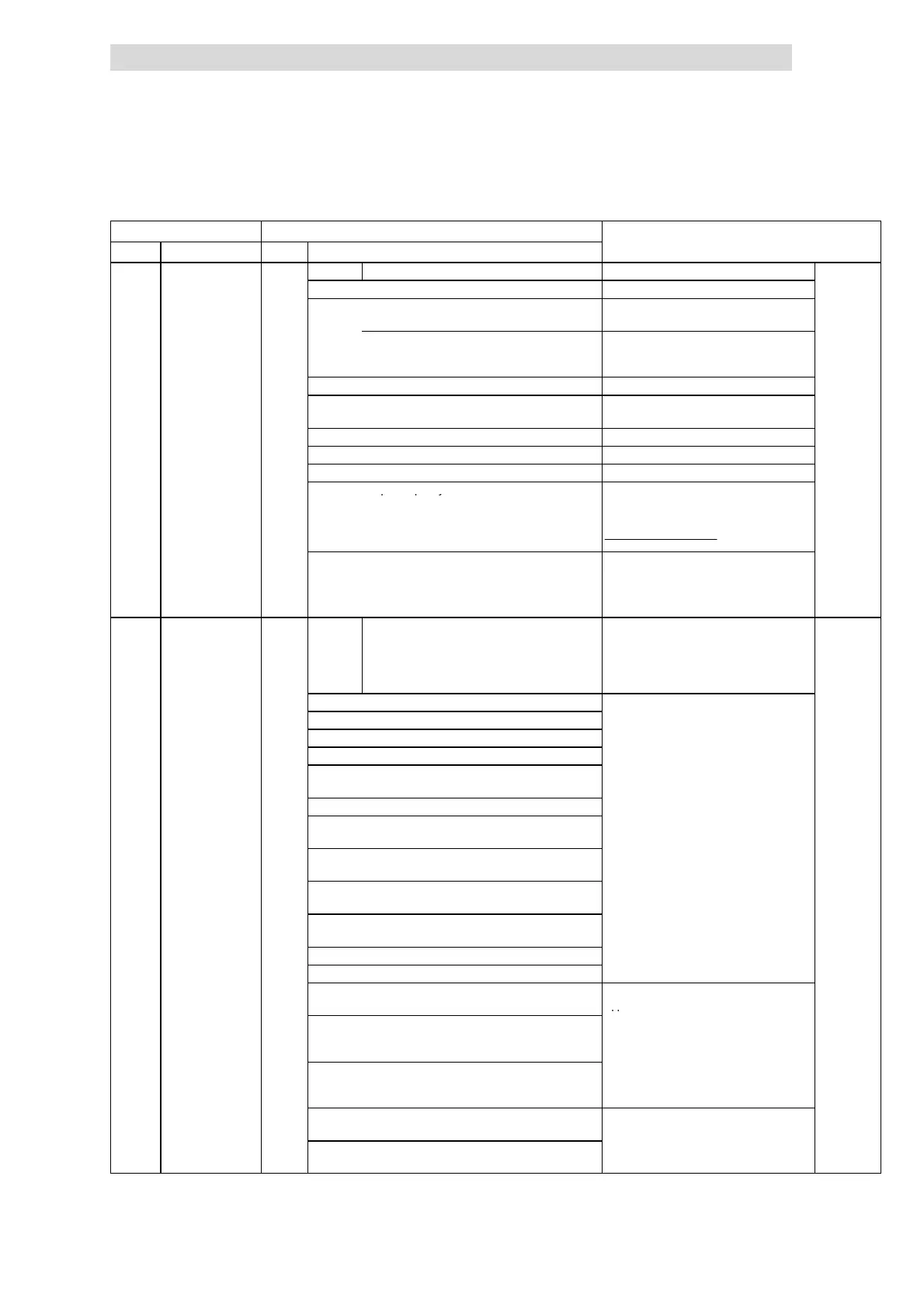
Code IMPORTANTPossible settings
No. SelectionLenzeName
C0421* Possible analog sig nals for C0421 ^
v
0 Output frequency (MCTRL1-NOUT+SLIP) 24000 ≡ 480 Hz
10.12-10
(cont.)
1
Device utilisation (MCTRL1-MOUT) at V/f
characteristic control (C0014 = 2 or 3)
16383 ≡ Rated active inverter current
(active current/C0091)
Actual motor torque (MCTRL1-MACT) at vector
control (C0014 = 4) or sensorless torque control
(C0014 = 5)
16383 ≡ Rated motor torque
2 Apparent motor current (MCTRL1-IMOT) 16383 ≡ Rated inverter current
3 DC-bus voltage (MCTRL1-DCVOLT) 16383 ≡ 565 VDC at 400 V mains
16383
≡ 325 VDC at 230 V mains
4 Motor power 285 ≡ Rated motor power
5 Motor voltage (MCTRL1-VOLT) 16383 ≡ Rated motor voltage
6 1/output frequency (1/C0050) (MCTRL1-1/NOUT) 195 ≡ 0.5 × C0011
7 Output frequenc y with limits
24000 ≡ 480 Hz
(DCTRL1-C0010...C0011)
0
≡ f < C0010
24000
⋅ (f − C0010)
480 Hz
≡ f ≥ C0010
8
Operation with process controller (C0238 = 0, 1):
Act. process controller value (PCTRL1-ACT)
24000 ≡ 480 Hz
Operation without process controller (C0238 = 2):
Output frequency without slip (MCTRL1-NOUT)
C0421*
v
(cont.)
Possible an alog signals for C0421
Selection 9 ... 25 correspond to the digital
functions of the re lay output K1 (C0008) or
the digital o utput A1 (C0117):
LOW = 0
HIGH = 1023
^
10.12-10
9 Ready for operation (DCTRL1-RDY)
10 TRIP fault message (DCTRL1-TRIP)
11 Motor is running (DCTRL1-RUN)
12 Motor is running / CW rotation (DCTRL1-RUN-CW)
13 Motor is running / CCW rotation
(DCTRL1-RUN-CCW)
14 Output frequency = 0 (DCTRL1-NOUT=0)
15 Frequency setpoint reached
(DCTRL1-RFG1=NOUT)
16 Value has fallen below frequency t hresho ld Q
min
(f < C0017) (PCTRL1-QMIN)
17 I
max
limit reached (MCTRL1-IMAX)
C0014 = - 5- : Torque setpoint reached
18 Overtemperature (ϑ
max
-5°C)
(DCTRL1-OH-WARN)
19 TRIP or Q
min
or pulse inhibit (IMP) (DCTRL1-IMP)
20 PTC warning (DCTRL1-PTC-WARN)
21 Apparent motor current < current threshold
(DCTRL1-IMOT<ILIM)
Belt monitoring
Apparent motor current = C0054
22 Apparent motor current < current threshold and
output frequenc y > frequency threshold Q
min
(DCTRL1-(IMOT<ILIM)-QMIN)
Current t hreshold = C0156
Frequency threshold Q
min
= C0017
23 Apparent motor current < current threshold and
RFG 1: Input = output
(DCTRL1-(IMOT<ILIM)-RFG-I= 0)
24 Warning motor phase failure
(DCTRL1-LP1-WARN)
25 Minimum output frequency reached (f ≤ C0010)
(PCTRL1-NMIN)