Chapter 9
217
Logic programming – Function blocks
9.10.4 State transition from Stop to Run
If the MELSEC-WS safety controller changes from the Stop state to the Run state, the
following behavioural patterns can be realized, depending on the state of the muting
sensors and of the OSSDs of the sensors (e.g. safety outputs of a safety light curtain).
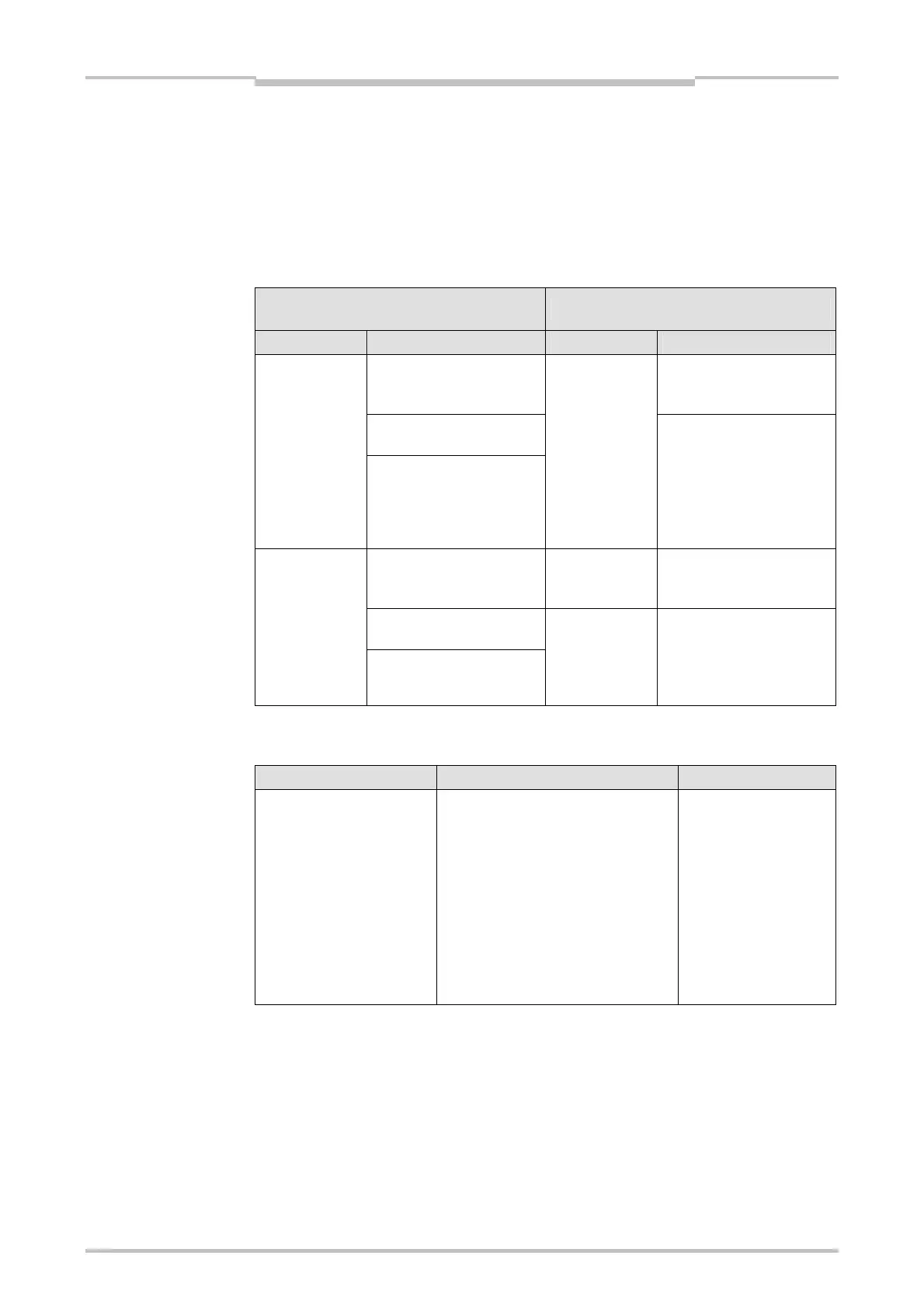
Table 100 shows details of the system behaviour during the transition from Stop to
Run.
State after the change from the Stop state to the
Run state
System behaviour
Input ESPE State of the muting sensors Run Next action
High
(e.g., no object in
the protective
field)
All muting sensors are Low
A normal muting
sequence is
possible.
Muting is possible after correct
activation/sequence of the
muting sensors.
The muting condition is
partially fulfilled.
All muting sensors have to
return to Low, before the
OSSDs of the sensor become
Low. If the OSSDs of the
sensors become Low before all
muting sensors have become
Low, Override has to be used.
The muting condition is
fulfilled.
Low
(e.g., object
detected)
All muting sensors are Low Muting is blocked.
The sensor OSSDs have to
become High before muting
can take place.
The muting condition is
partially fulfilled.
Override is
required, if
configured.
Either transition to normal
behaviour (in case of a
cyclically correct sequence of
sensor states) or the total
override time is exceeded.
The muting condition is
fulfilled.
9.10.5 Error states and information on resetting
Diagnostic outputs Resetting the error state Remarks
Muting error:
Error in the concurrency
monitoring function
Error in the total muting
time monitoring
Error in the direction
detection
Sequence error detected
Error in the sensor gap
monitoring
A complete valid muting cycle has to
occur before any muting error can be
reset. To this purpose either Override
has to be used or all muting sensors
and OSSDs of the ESPE have to be
clear and a subsequent valid muting
sequence has to be applied.
If one of these two conditions is
fulfilled, the Muting error output
returns to Low, provided that no other
error exists.
The Enable output
changes to Low and
Fault present changes
to High, if the Muting
error output is High.
Table 100:
Stop-to-Run transition
behaviour for muting
functions
Table 101:
Error states and information
on resetting for Muting
function blocks

 Loading...
Loading...






