ROYAL evo
Page 88
' TIP !
When you reach the alarm threshold that you prefer
(first audible alarm), set the threshold to 6.5 V. The
transmitter will then only emit an alarm when the bat-
tery falls to the minimum threshold. That tells you how
long you have to land your model. Don’t forget to set
“your” threshold again afterwards.
13.1.4. Parameter „Battery charge“
ü global effect
Is set to 0 mAh if the battery voltage drops below
6.5 V.
This parameter allows correction of the charge meas-
ured by the battery management system (è 8.1.).
13.1.5. Parameter „Contrast“
ü global effect
Range –8 to 8
Default setting 0
This parameter enables you to adjust the contrast of the
screen to suit the prevailing temperature conditions.
13.1.6. Parameter „ Check throttle “
I affects active model only
! Guards against the power system starting up
accidentally when you switch on the model!
Check thr ONCheck thr ON
Electric-powered models may burst into life at full throt-
tle when you switch on unless the throttle control on
the transmitter is at the idle position.
With Check THROTTLE = ON the software checks two
conditions when you switch on the transmitter:
1. Is Throttle-Cut switched off?
2. Is the THROTTLE control at idle?
The message is displayed as long as the throttle control
is not in idle position: RF radiation starts immediately,
but .due to safety reasons the throttle signal is kept in
idle.
13.1.7. Parameter “Check RF”
ü global effect
only possible with synthesizer RF module
! Safety query when transmitter is switched on!
Check RF ONCheck RF ON
Changing channels with synthesizer RF modules is rela-
tively simple, so the ROYALevo provides an additional
security query which can be activated.
With Check RF = ON the transmitter asks you whether
you really want to start transmitting on the set channel;
this it does every time you switch on. You must confirm
this by pressing a button (or by switching the transmit-
ter off again).
13.2. Sub-menu “Define mixer”
ü Defined mixers are globally available
The ROYALevo provides 14 freely definable mixers. From
this “mixer pool”, which you create over a period of time
to suit your applications and models, you can use up to
5 different mixers in one model as often as you like.
Note for helicopter pilots
These freely definable mixers are only available
for fixed-wing models. The system provides a set
of ready-made mixers for model helicopters
which cannot be changed.
Note: Predefined mixers
Mixers 1-5 are already set up as standard, but they can
be changed at any time to suit your personal require-
ments. However, please note that we cannot guarantee
that the template will work 100% correctly if you chan-
ge the standard mixers and subsequently create a new
model using a model template (è12.4.) which includes
the assigned “standard mixers”.
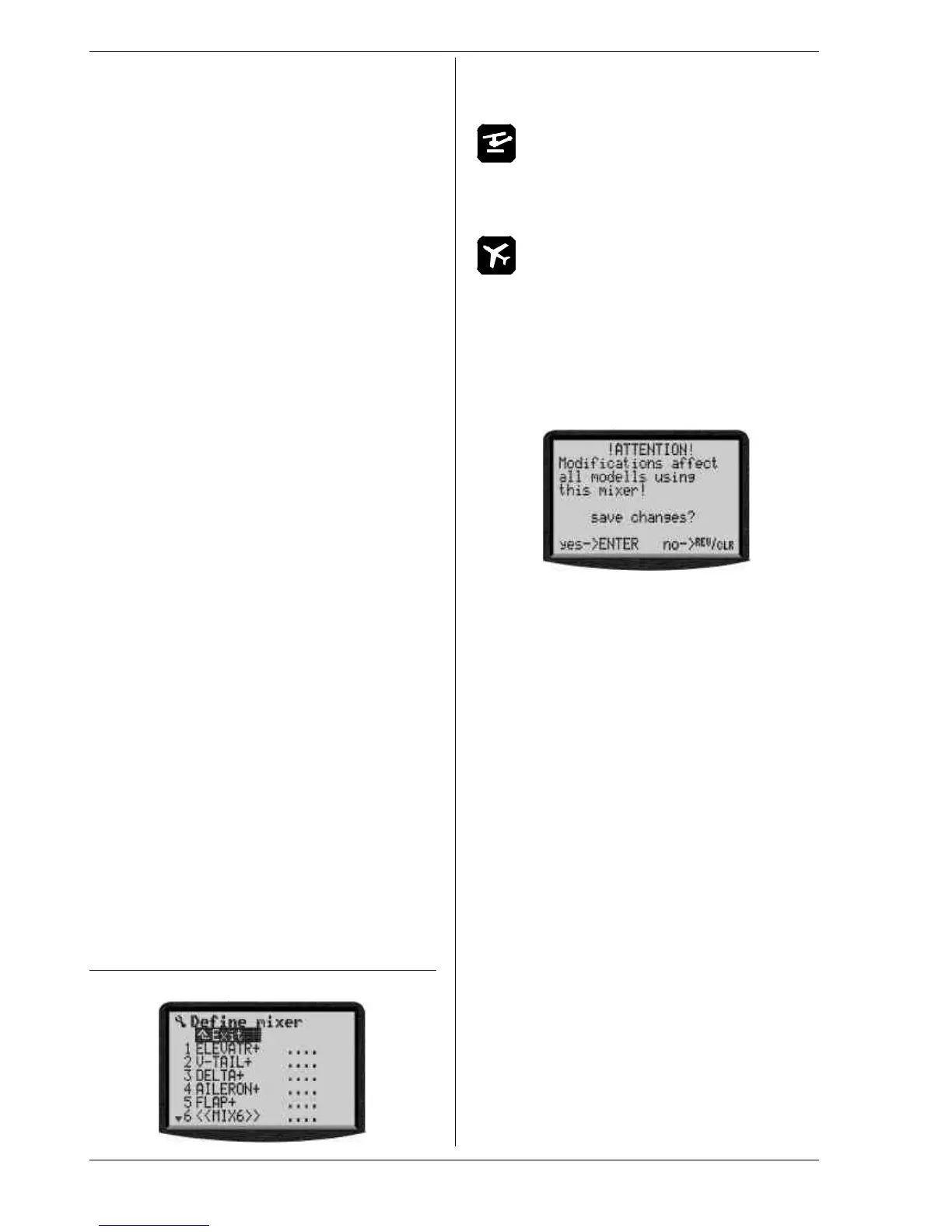
If you attempt to change one of these “standard mixers”
the following on-screen note appears:
13.2.1. How the freely definable mixers work
The basic principle of the ROYALevo’s freely definable
mixers is based on the proven method of working em-
ployed by the MULTIPLEX PROFI mc 3000 and 4000
series of radio control systems. A simple method of
explaining this is as follows:
We always start from the “control functions” or the ser-
vo movements. Example: aileron servo on a glider (pre-
defined mixer: AILERON+). When do we want this servo
to move?
1. When the “aileron” control is operated
(primary function)
2. When the “spoiler” function is operated
(ailerons up as landing aid)
3. When the “flap” control is operated
(up/down movement of the ailerons to trim the
wing section for thermal or speed flying)
4. When the “elevator” control is operated
(up/down movement of the ailerons to amplify the
elevator response when flying “square” aerobatic
manoeuvres => snap-flap)
We can see that the aileron servo is to be controlled by
4 transmitter controls. The “AILERON+” mixer therefore
has 4 inputs (up to 5 inputs are possible).
The mixer adds together the value of the signals gener-
ated by the individual inputs (hence also the sum sym-
bol ££ ) and passes the result to the aileron servo or
servos.
If this or any other mixer is to work correctly on a model,
the following requirements must be satisfied:
• The appropriate assignment list with the correct
transmitter controls -> inputs must be assigned to
the model (è L Setup, Assignment, Controls).