ROYAL evo
Page 100
15.4.1. Parameter „Collective Pitch+ and -“
I affects the active model memory
4 Separate value for each flight phase
Range -100 ... +100%
F can be assigned to 3-D digi-adjustor
The parameters Collective pitch+ / Collective pitch- are
used to set the mixing ratio for collective pitch -> tail
rotor for climb and descent. These values can be set
separately for each flight phase:
Collp.+ à Correction for climb
Collp.- à Correction for descent
15.4.2. Parameter „Yaw diff.“
I affects the active model memory
4 separate value for each flight phase
Range -100 ... +100%
F can be assigned to 3-D digi-adjustor
The parameter Yaw diff. is designed to reduce the tail
rotor travel in one direction. This may be necessary if
your model behaves differently when yawing to left or
right (rotational speed). A separate value can be set for
each flight phase.
15.4.3. Parameter „Offset“
I affects the active model memory
4 separate value for each flight phase
Range -100 ... +100%
F can be assigned to 3-D digi-adjustor
There will be some torque at 0° collective pitch (main
rotor), which means that a slight pitch angle (= Offset)
of the tail rotor blades is necessary even at this setting.
This value can also be set separately in each flight pha-
se; this will be necessary if you set a different system
rotational speed in each phase. In the flight phase Auto-
rotation the Offset can be changed so that the tail rotor
exhibits no pitch. This is especially important if your
model features a driven tail rotor in auto-rotation mode.
15.4.4. Parameter „Zero point“ and Coll.Pitch display
I Affects the active model memory
Range -100 ... +100%
F Can be assigned to 3-D digi-adjustor
The Zero point parameter allows you to set the collec-
tive pitch stick position at which the collective pitch ->
tail rotor mixer starts to take effect. Fro climbing the
value is set under Coll.+. In the other direction (descent)
the mixer takes effect with the value set under Coll.- (è
15.4.1).
Procedure:
1. First set the starting point for the TAIL mixing.
Move the collective pitch stick to the hover posi-
tion. Set the parameter Zero point to the same
value as indicated under Collect.
2. The parameter Collective pitch simply supplies
information, and therefore cannot be changed; it
just indicates the current collective pitch position.
Transfer the value shown under Collective pitch to
the parameter Zero point.
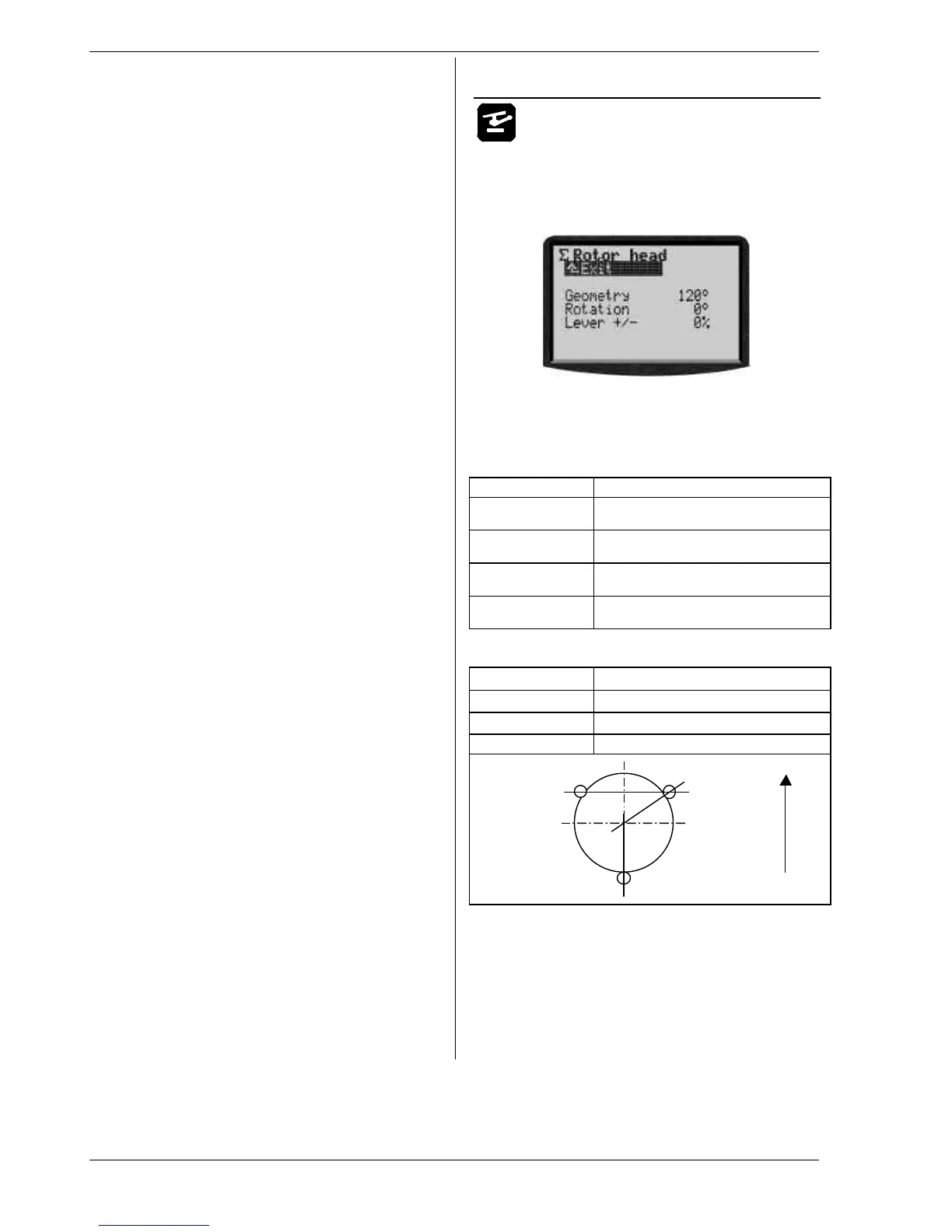
15.5. Sub-menu „Rotor head“
(electronic swashplate mixer/CCPM)
The ROYALevo features a swashplate mixer
(CCPM) which can be set up for any swashplate type (up
to 4 actuation points or servos) for which electronic
mixing is required. Three parameters are required for
this::
Geometry, Rotation, Lever +/-
Preparation:
If the Rotor head mixer is to appear in the menu G Mix-
ers, the following servos must be assigned in the menu
K Servo/Assignment (è 16.2) in accordance with
the swashplate type:
Servo Note
Head f/b
Swashplate servo front/back
Head le
Swashplate servo left
head ri
Swashplate servo right
Head 4
For 4-point linkage only
The servo assignment sequence is freely variable.
Example 1:
3-point 120° swashplate
Geometry +120°
Rotation +0°
Lever +/-
0%
Direction of
flight
Head f/b