ROYAL evo
Page 98
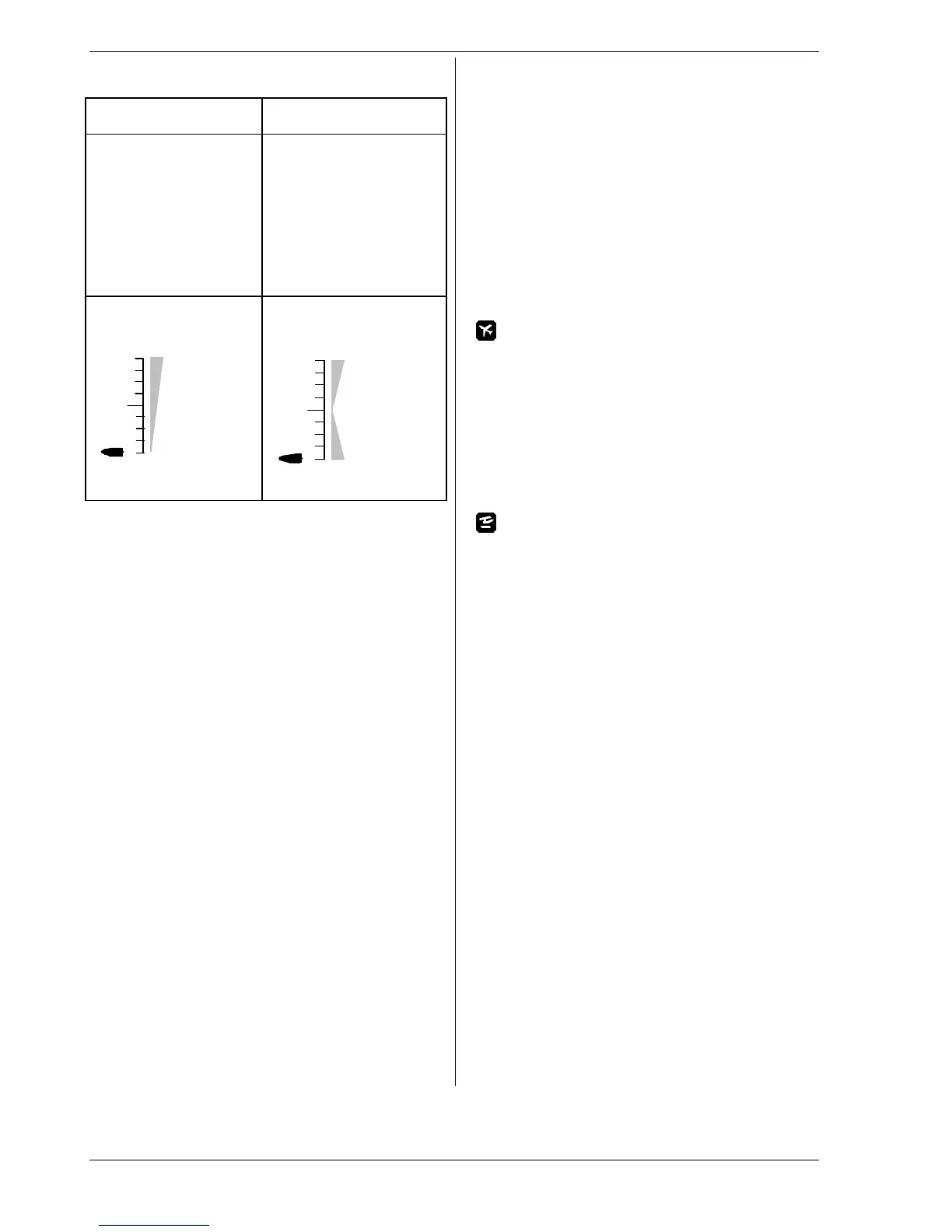
The following table shows the characteristics of the two
gyro systems which are in common use today.
Damping gyro
(normal gyro)
Heading-lock gyro
The gyro damps (slows)
the rotational movement
of the model around the
axis to be stabilised.
The gyro damps (slows) the
rotational movement of the
model around the axis to be
stabilised, and also moves
the model back to its start-
ing point. You can select
either heading-lock or
damping mode as the start-
ing point, according to pref-
erence.
Gain range 0 ... 100%:
100% (max.)
50%
Gain range -100 ... +100%:
Max damping
effect
+100%
-100%
Max. heading
effect
15.3.1. Parameter „Mode“
I Affects active model memory only
The ROYALevo provides three different gyro modes:
Control The transmitter control Gyro (must be
assigned) controls gyro gain independ-
ently of the position of the flight phase
switch. Can be suppressed by yaw com-
mand. The adjustment range is -100% to
+100%.
Damping Two different gain settings can be set for
each flight phase. The switch Mix-1 is used
to switch between the settings. Can be
suppressed by yaw command. The ad-
justment range is 0% to +100%.
Heading Two different gain settings can be set for
each flight phase. The switch Mix-1 is used
to switch between the settings. The ad-
justment range is -100% to +100%.
0% to +100% setting
The gyro works as a damping gyro. Can be
suppressed by yaw command
0 to -100% setting
The gyro works in heading lock mode. No
suppression required.
In each flight phase the switch Mix-1 can
be used to select heading lock or damping
mode.
Mode: Control
In this mode gyro gain is controlled manually by the
transmitter control Gyro. In the model templates this is
the slider E. This mode of operation is possible with all
gyros which feature an input for gain control. These also
include heading-lock gyros.
Gyro suppression is possible (è 15.3.3).
Mode: Damping
Gyro gain is selected using the parameter Damping
(Gyro gain). Separate values can be set for each flight
phase. This allows gyro gain to be varied to suit any
flight task or flight phase.
Application:
Fixed-wing models and helicopters which are fitted
with a normal gyro.
Gyro suppression is possible (è 15.3.3).
Mode: Heading
Gyro gain / mode of operation is selected using the
parameter Damping / Heading (Gyro gain). Separate
values can be set for each flight phase. This mode pro-
vides the means to adjust gyro gain to the optimum
setting for any flight task or flight phase.
If the pilot of a fixed-wing model switches to a gain
range (è15.3.2.) of 0 ... –100% (⇒ Heading) within a
particular flight phase, yaw trim is automatically swit-
ched off. Trim changes now affect a separate yaw trim
memory, designed to carry out minor corrections (tem-
perature drift). This trim value is used in every flight
phase in which the operating mode Heading is invoked.
This trim facility is shown in Status displays 1-3. The
parameter Trim (è 14.2.2.) also shows exclusively the
trim setting in the operational mode Damping, accord-
ing to the flight phase.
With a model helicopter it is also possible to switch
between two values for gyro gain (è 15.3.2) within a
particular flight phase.
Requirement:
At the Assignment stage a switch must be assigned to
the mixer switch Mix-1 (è 13.3.4).
If the pilot of a model helicopter switches to a parame-
ter with a gain range of 0 ... -100% (=> Heading):
• yaw trim is automatically switched off. Trim
changes now affect a separate yaw trim memory,
designed to carry out minor corrections (tempera-
ture drift). This trim value is used in every flight
phase in which the operating mode Heading is in-
voked.
This trim facility is shown in Status displays 1-3. The
parameter Trim (è 14.2.1.) also shows exclusively
the trim setting in the operational mode Damping,
according to the flight phase.
• The static tail rotor compensation (è 15.4) is
switched off.
Application:
Fixed-wing models and helicopters fitted with a head-
ing-lock gyro.
Gyro suppression is possible (è 15.3.3). However, this is
only effective if the gyro is operated in Damping mode
(gyro gain 0 .. +100% => Damping).