ROYAL evo
Page 106
16.2.3. Assigning servos for helicopters
Model type „Helicopter“
Note
Aileron
Roll signal only No mixing
for mechanical rotor head mixing
Elevator
Pitch-axis signal only No mixing
for mechanical rotor head mixing
Rudder
Yaw signal only No mixing
Throttle
Throttle signal with mixed throttle curve,
throttle limiter, direct throttle, throttle-cut
Spoiler
(for fixed wing models)
RPM
Speed regulator control
L. gear
Landing gear signal No mixing
Tow rel.
Tow release signal No mixing
Brake
Brake signal No mixing
Gyro
Gyro signal, including all mixed signals
from gyro mixer
Mixture
Mixture signal for special carburettors
Collect.
Collective pitch signal No mixing
for mechanical rotor head mixing
Thr.lim.
Throttle limiter signal No mixing
TAIL
Tail rotor signal, including all mixed signals
-> tail rotor (e.g. static tail rotor compensa-
tion / Revo-Mix)
HEAD f/b
HEAD le
HRAD ri
HEAD 4
Signal for swashplate servos **
HEAD f/b, le and ri for swashplates with
3-point linkage (e.g. 3-point 120°)
HEAD f/b, le, ri and 4 for swashplates with
4-point linkage (e.g. 4-point 90°)
(electronic swashplate mixing, CCPM)
** Note
To ensure that the electronic swashplate mixing works
correctly, the servos must be connected to the receiver
in a particular, pre-defined sequence. (è 15.5.)
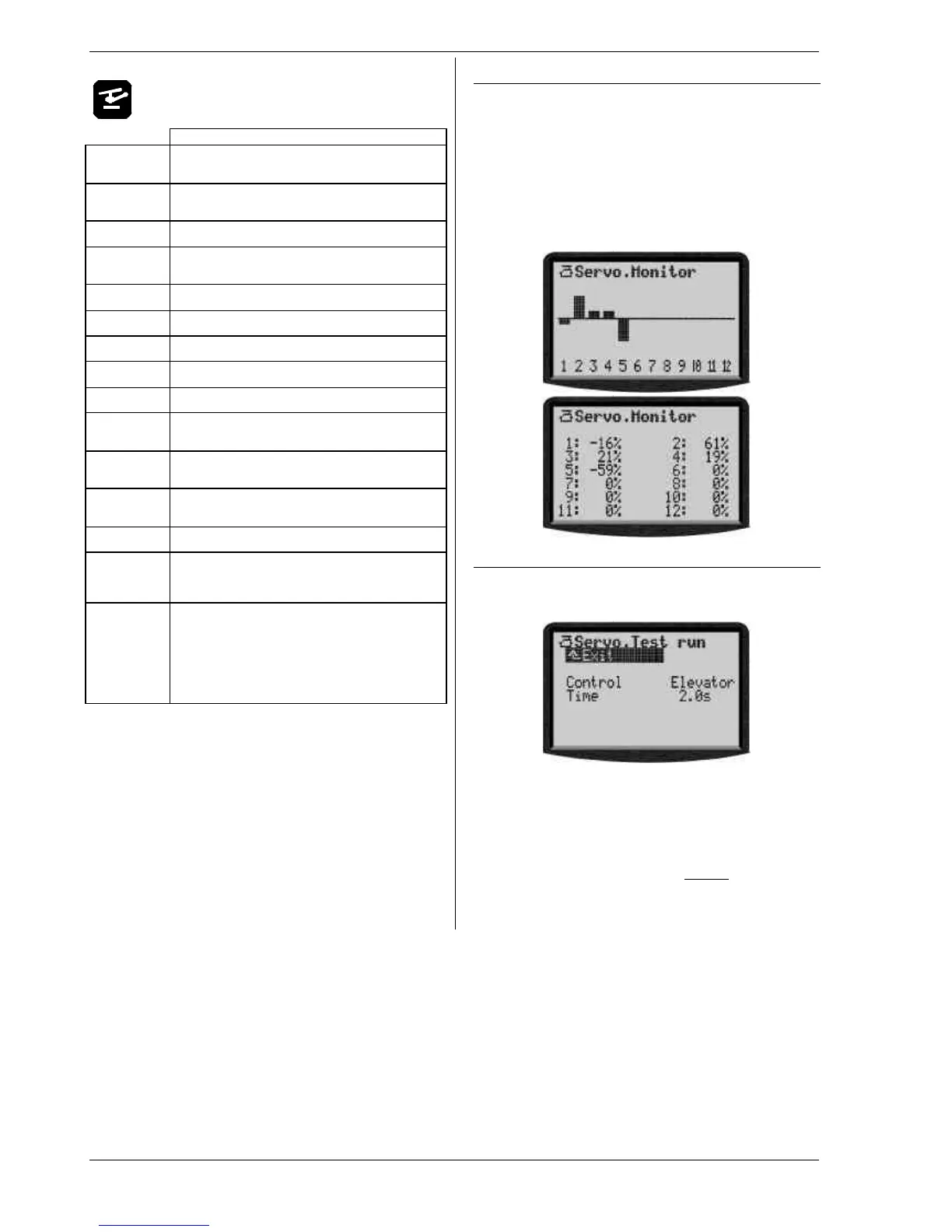
16.3. Sub-menu „Monitor“
The servo monitor acts as a substitute for a receiving
system with servos connected. It enables you check the
function / response of speed controllers, gyro systems,
speed regulators etc., and helps to locate errors.
Two forms of display are available: graphical, with the
output signals displayed in bar graph form, and numeri-
cal, with the signals displayed in % values. You can
switch between the two types of display using the
UP/DOWN (s / t) buttons, or alternatively using one of
the two 3-D digi-adjustors.
16.4. Sub-menu „Test run“
Automatic servo run, which can be used for test pur-
poses and demonstrations, or as an “electronic” aid
when range-checking.
When you select a transmitter control, the software
generates a steadily changing control signal, running
from one end-point of the control to the other. All the
servos operated by this transmitter control (directly or
via a mixer) start running.
You can stop the test run by either of two methods:
• Press the REV/CLR button ⇒ „Control “ appears
• select no control („ - - - - - - - “)
The transit time can be set within 0,1 – 4,0 sec.