POSICON positioning control – Supplementary manual for series SK 200E and SK 250E-FDS
32 BU 0210 en-3117
Pos: 13 7 /Anlei tung en/El ektr onik/P OSICON /4. Funkti onsbes chr eibung/ Posi tionier ungs met hode Lin ear oder Wego ptimal @ 14\mod_1478156842700_388.docx @ 2300689 @ 3 @ 1
4.2.4 Linear or optimised path positioning method
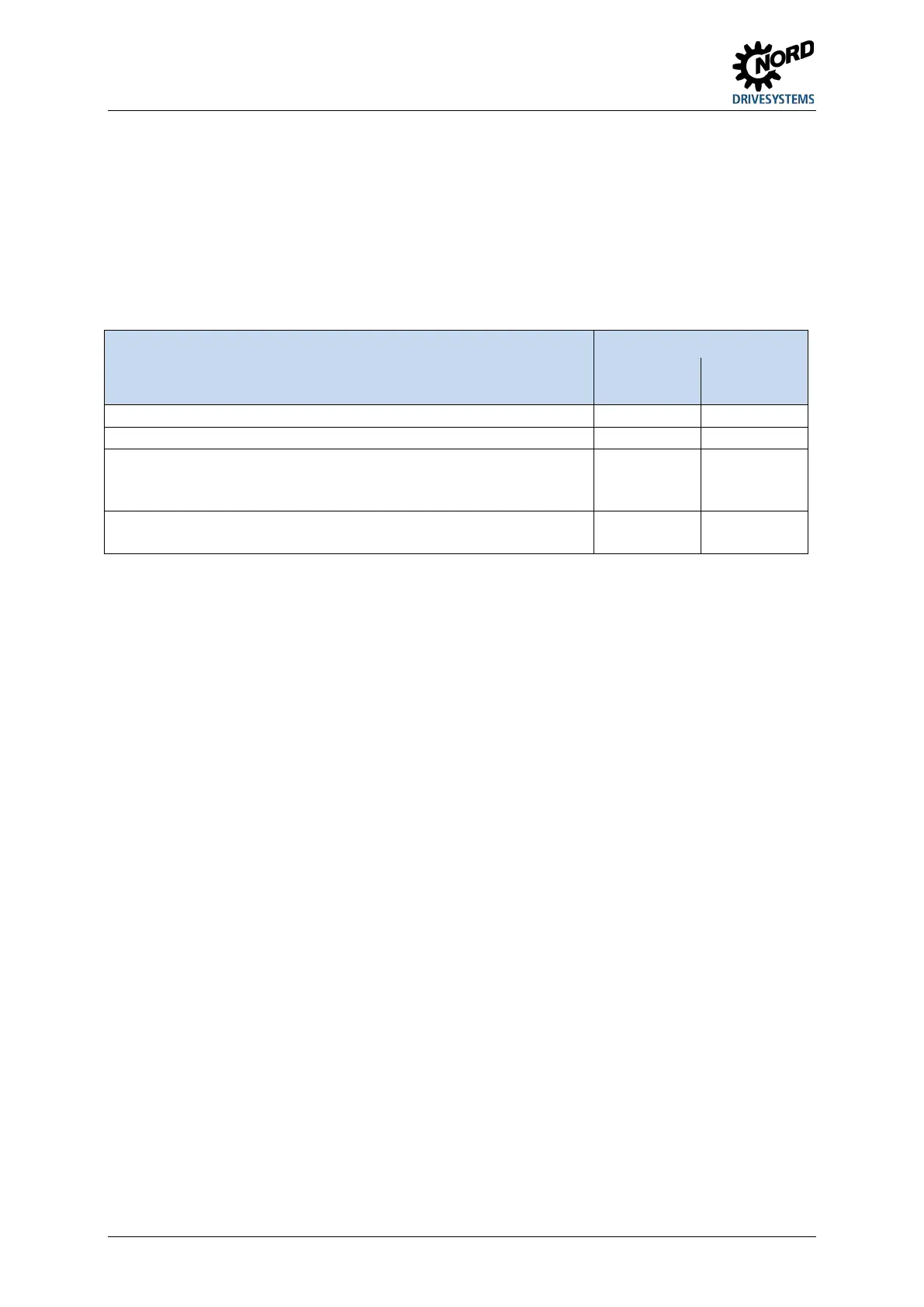
The encoder used for positioning is activated via parameter P604 "Encoder type". Here, a
differentiation is made between normal measurement (for "linear" systems) and "path optimised"
measurement (for circulating systems).
In the function "Optimum Path" the multi-turn resolution of the encoder for the overflow point can be
additionally limited via parameter P615 "Maximum Position". The multiturn resolution in rotations (1
rotation = 1,000 rev) is entered.
Select parameter P601 "Actual position" to check the setting and function of the encoder.
Encoder type Measuring method
Linear
Optimised
path
Incremental encoder 0 3
Incremental encoder with saving of the position in the FI
CANopen absolute encoders (only for encoders approved by NORD
( Section 3.3.1.1 "Approved CANopen absolute encoders (with bus
cover)"))
1 5
CANopen absolute encoders for manual configuration ( Section
4.2.2.3
"Manual commissioning of the CANopen absolute encoder")
6 7
Pos: 13 8 /Anlei tung en/El ektr onik/P OSICON /4. Funkti onsbes chr eibung/ Posi tionier ungs met hode Lin ear oder Wego ptimal _Erg änzung _01 (BU 0210) @ 14\mod_1478159362812_388.docx @ 2300868 @ @ 1
Table 3: Parameter P604 encoder type selection
Pos: 14 1 /Allg emein/ Allg emeing ültig e Mod ule/---------Sei tenumbr uch ko mpakt --------- @ 13\mod_1476369695906_0.docx @ 2265495 @ @ 1
 Loading...
Loading...




