POSICON positioning control – Supplementary manual for series SK 200E and SK 250E-FDS
56 BU 0210 en-3117
Pos: 194 /A nleit ung en/El e ktr onik /POS ICON /4. F unk tio nsbes chr eib ung/ Au sga ngs meld ung en @ 14\ mod_1478522958616_388.docx @ 2301929 @ 2 @ 1
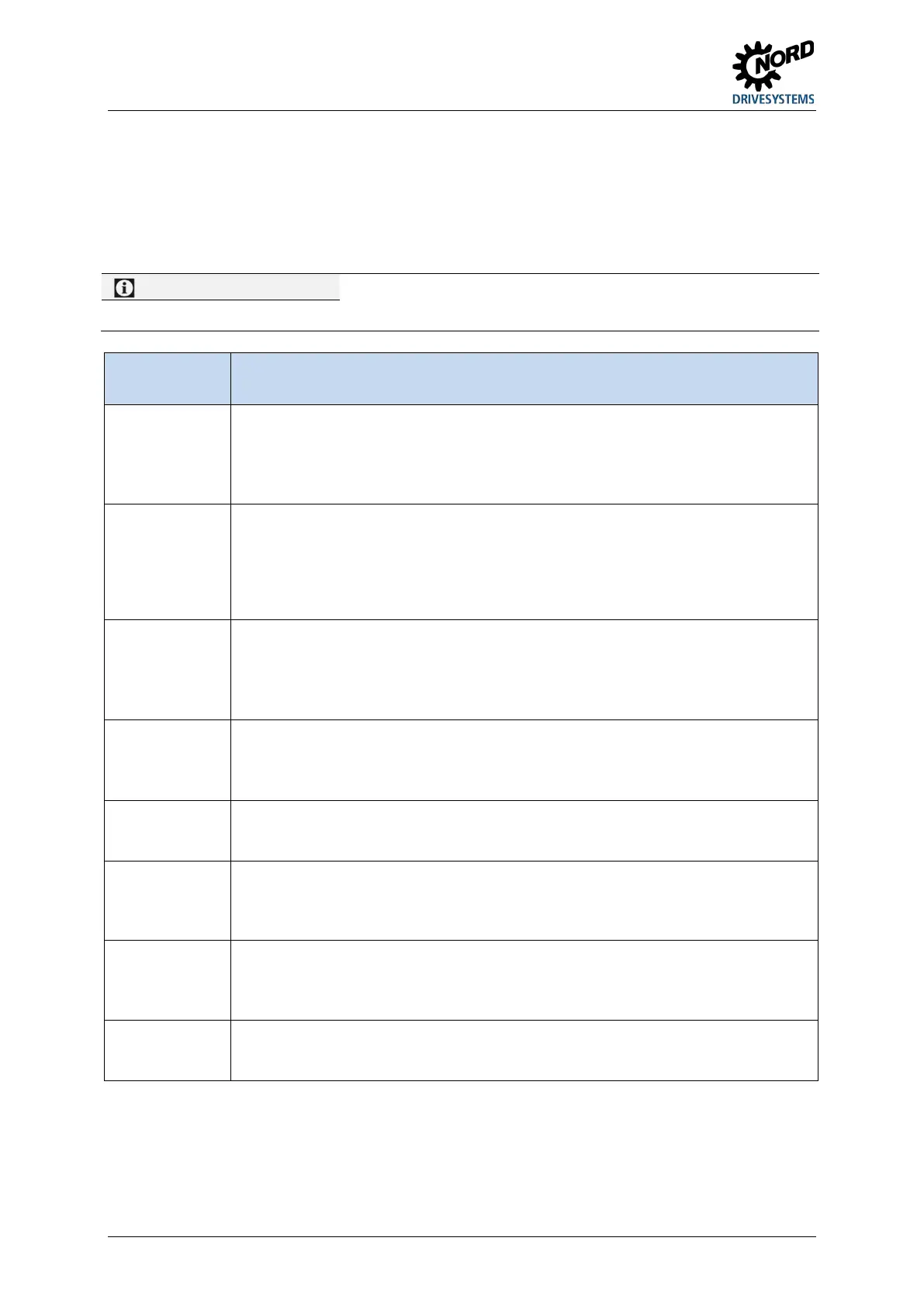
4.10 Output messages
The frequency inverter provides various status messages for the positioning function. These can be
output physically (e.g. via digital output P434…) or alternatively as a Bus IO Out Bit (P481) For use of
the Bus IO Out Bit, one of the actual bus values (P543…) must be set to the function "Bus
IO Out Bits 0-7".
Availability of status messages
The status messages are also available if the position control is not enabled (P600 = "Disabled" setting)
Function
(Setting)
Description
Reference
(20)
The message is "active" if a valid reference point is available.
The signal is cancelled when a reference point run starts.
The signal status after the supply voltage is switched on depends on the setting in P604
"Encoder type". For the settings for incremental encoders with saving of position and for
absolute encoders, the signal state after switch-on is "active" (High)", otherwise it is "Low".
Position reached
(21)
With this function the frequency inverter reports that the set position has been reached. The
message is "active" if the difference between the setpoint and the actual position is smaller
than the value set in parameter PP625 "Output Hysteresis" and the actual frequency is lower
than the frequency parameterised in parameter P104 "Minimum Frequency" + 2 Hz.
For synchronous operation the frequency parameterised in P104 does not apply, but rather
the frequency setpoint is the condition.
Comparative
position
(22)
The message is "active" if the actual position is greater or equal to that set in parameter
P626 "Comparative Position Output". The signal is cancelled again if the actual position is
less than P626 minus the hysteresis (P625). The sign is taken into account.
Output signal 0 1 ("High"): p
ist
≥ p
vergl
Output signal 1 0 ("Low"): p
ist
< p
vergl
- p
hyst
Comparative
position value
(23)
This function" corresponds to function 22 "Comparative Position" with the difference that the
actual position is processed as an absolute value (without sign).
Output signal 0 1 ("High"): |p
ist
| ≥ p
vergl
Output signal 1 0 ("Low"): |p
ist
|< |p
vergl
| - p
hyst
Position array
value
(24)
The message is "active" if a position which is parameterised in parameter P613 is reached or
exceeded. This function is always available, regardless of the setting in P610.
Comparative
position reached
(25)
The message is "active" if the difference between the actual position and the value
parameterised in P626 "Comparative Position Output" is less than the value set in parameter
P625 "Output Hysteresis".
Output signal 0 1 ("High"): |p
vergl.
- p
ist
| < p
hyst
position value
reached
(26)
The message is "active" if the difference between the actual position and the value
parameterised in P626 "Comparative Position Output" is less than the value set in parameter
P625 "Output Hysteresis".
Output signal 0 1 ("High"): |(|p
vergl
|
.
- |p
ist
|)| < p
hyst
synchronisation
(27)
The message is "active" if the slave drive in the "Flying Saw" function has completed the start
phase and is synchronised with the master axis, taking into account the "Output hysteresis"
which is set in P625.
Table 5: Digital output messages for positioning function
Pos: 19 6 /Anlei tung en/El ektr onik/P OSICON /5. Inbetri ebna hme/! Inbetr iebn ahme @ 1 4\mod_1478529527176_388.docx @ 2301975 @ 1 @ 1
 Loading...
Loading...




