4 Function description
BU 0210 en-3117 43
Pos: 16 4 /Anlei tung en/El ektr onik/P OSICON /4. Funkti onsbes chr eibung/ Lag erergel ung - Fu nkti onswei se @ 14\mod_1478515892877_388.docx @ 2301893 @ 2 @ 1
4.7 Position control – Method of operation
The position control functions as a P- feedback loop. The set position and the actual position are
continuously compared with each other. The setpoint frequency is formed by the multiplication of this
difference with parameter P611 "Position Control P". This value is then limited to the "Maximum
Frequency" parameterised in parameter P105.
A "Path distance" is calculated from the "Braking Time" parameterised in parameter P103 and the
current speed. Without taking the braking time into account in the distance calculation, the speed
would normally be reduced too late and the set position would be exceeded. Exceptions to this are
highly dynamic applications with extremely short braking and starting times and applications in which
only very small path increments are specified.
A so-called target window can be specified in parameter P612 "Target window value". Within the
target window the setpoint frequency is limited to the frequency set in parameter P104 "Minimum
Frequency" and enables a type of "slow running". This frequency can not fall below 2 Hz. The "Slow
running" function is especially recommended for applications with greatly varying loads, or if the drive
unit has to be operated without speed control (P300 = "Off").
Parameter P612 defines the starting point and therefore the distance for the "slow running" which ends
at the set position. It does not have any effect on the output message "Position reached" (e.g.
parameter P434).
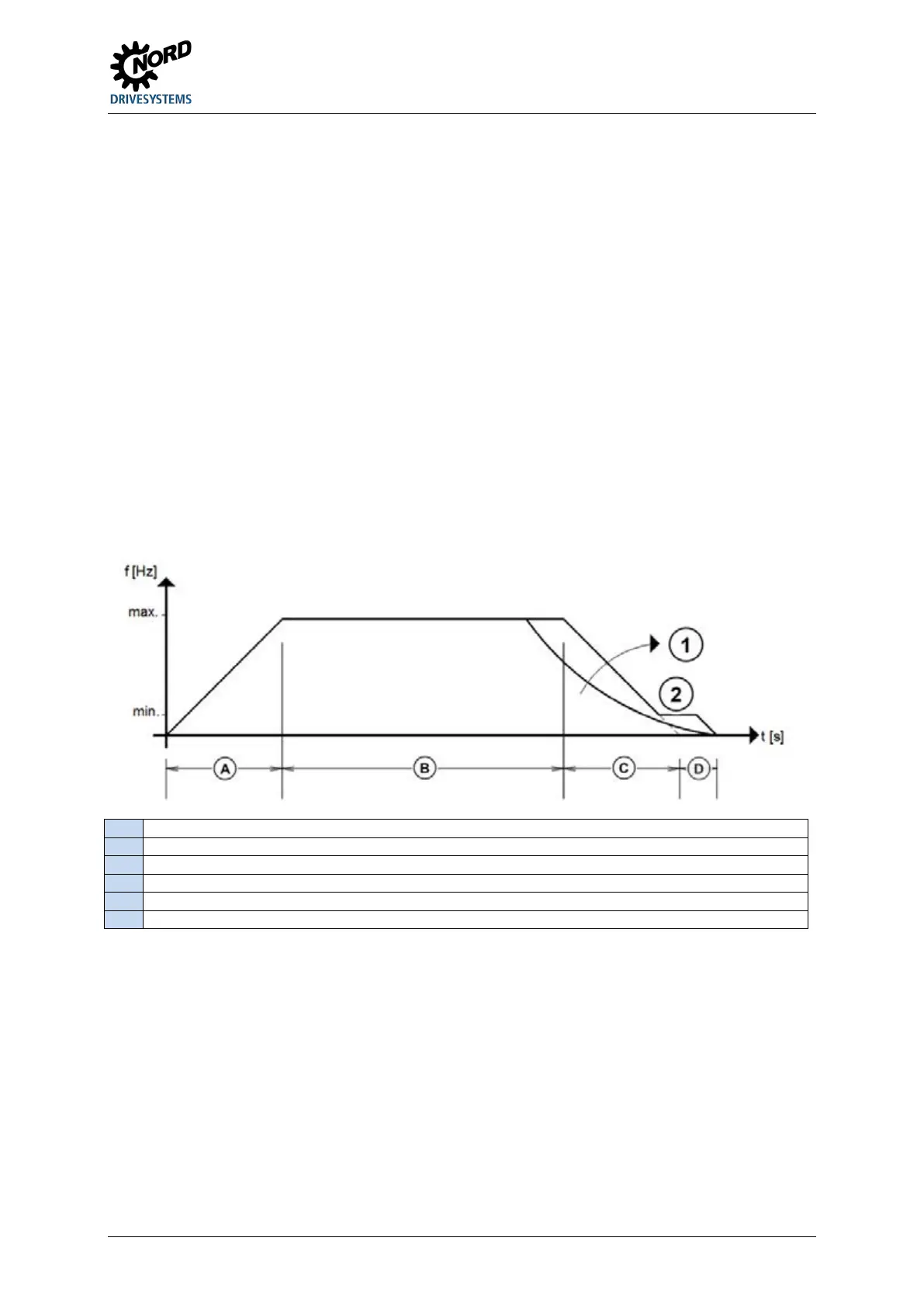
B = Travel with maximum frequency
C = Deceleration time
Time determined by the "Target window value" (P612)
2 = Travel with minimum frequency
Figure 3: Position control sequence
Pos: 16 5 /Allg emein/ Allg emeing ültig e Mod ule/---------Sei tenumbr uch ko mpakt --------- @ 13\mod_1476369695906_0.docx @ 2265495 @ @ 1
 Loading...
Loading...




